
����TMS320F28044�����Դ�OӋ
����ʲô�ǔ����Դ?TI�Ĺ����ό������Դ�M���˶��x�������Դ���ǔ��ֻ����Ƶ��Դ�aƷ�������ṩ�����ͱO�ع��ܣ������쵽��������·�Ŀ��ơ�ᘌ���ͬ�I��đ��ã�TI�Ƴ��˶����Ԍ��F�����Դ�aƷ��DSP̎��������TMS320F280xϵ�С�TMS320F2801xϵ�У�߀�п�ݔ��16ͨ���߾���PWM��DSP̎����TMS320F28044����Ҫ��DCͨ���^���ϵ�y����28044�OӋ�����Դ���@�÷dz������ף�һ�wDSP�^��ɿ���16ͨ����DC��ݔ��늉�����ɾ��̣��O����������Դϵ���`���ԣ�ͬ�r�Դϵ�y��׃�÷dz����ܺͿɿء�������Ҫ̽ӑ��λ���TMS320F28044�OӋ��ͨ����DC/DC�Դ��
ϵ�y���
�����D1չʾ�˻���C2000DSP�OӋ�Ķ�ͨ��DC/DC�����Դϵ�y��ܣ�DC/DC���ؓ�Y��һ�����͵�BUCK�·����ͬ��BUCK�·��ݔ��늉������W�j�ɘӺ�ֱ���͵�DSP��ADC�˿ڣ�DSP�Ȳ���ԓֵ�ɘӣ�Ȼ���ϵ�y�Ľo��ֵ�����^�����^����`��ֵ���^PID�{�����õ�ÿ��ͨ����ռ�ձȣ��@��ÿ·BUCK�·���γ�һ���]�hϵ�y��ͬ�rһЩ���O�ӿ���RS232��I2C��DSPͨ�^�@Щ�ӿڿ����c��λ�C���F�������Q������ͨ�^I2C�ӿځ���ѭPMBUS�f�h���M�����ܔ����Դϵ�y��
�߾���PWM
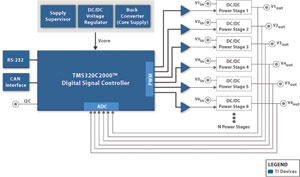
�D1 ����C2000����DC/DCϵ�y���
����TMS320F28044�ṩ���_16·�ĸ߾���PWM������Փ�ϣ�PWM����ϵ�y���l100MHz���^�߿��Եõ�10ns�ķֱ��ʣ���������DC/DC׃�Q�������Ҫ�õ����ȸߡ��y��С��ֱ��ݔ��늉�����ô����Ҫ���ߵ��_�P�l�ʺ��ߵ�PWM�ֱ��ʡ�TMS320F28044�Ȳ��ṩһ��߅�ؿ�����������ݔ���^С150ps��PWM���Oϵ�y�����l��100MHz��PWM�����l�ʞ�200kHz��ռ�ձ���Ҫݔ��50.1%������H�Hʹ����ͨ��PWM��ݔ������ô����ֵ�O��5000��COMPA��ֵ�O��250���^�ߞ�2500��ns ,ռ�ձȾ͞�50%���O��251��ռ�ձȾ͞�50.2%����ô��β����^���ȵĵõ��ӽ���50.1%��ռ�ձ��أ��@����Ҫ�õ��߾���PWM����COMPA��ֵ�O��250��������Ҫ�ٮa��5ns�ĸ��ƽ��CMPAHR�O��32��32��150=4.8ns��ռ�ձȞ�50.096%��CMPAHR�O��33��33��150=4.95ns��ռ�ձȾ͞�50.099%��CMPAHR�O��34��34��150=5.1ns��ռ�ձȞ� 50.102%���ɴ˿�Ҋ��CMPAHR�O��33�r��ռ�ձȵ��`��H��0.001%�������ʹ�ø߾��ȵ�PWM�����`��͞�0.1%����Ҋͨ�^ʹ�ø߾��ȵ�PWM���������`��sС�ɂ������������ʹ���������Ɣ����Դ��Ԓ�����Դ����ߔ����Դ�Ŀ��ƾ��ȡ�
BUCK�h·�ؓ�
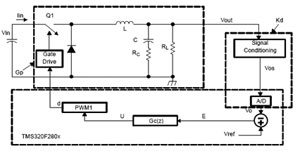
�D2 ����BUCK�Ĕ��ֿ����ؓ�
�����D2չʾ�˻���BUCK�·��DC/DC���ֿ����ؓ䣬Q1�����O�ܡ�L��C��R�M����BUCK������׃�Q����ݔ��늉����^�{���·�D�Q��0��3V��늉���̖�͵�DSP�ăȲ�ADC��ADC��ݔ���c����늉����^֮��õ��`����̖E��E�ٽ��^늉��h�Ŀ�����GC�õ��{�����BUCK�{����ռ�ձ�U��U����Ƭ��PWMģ�Kݔ����Ӌ�����ӣ���������ռ�ձȵ�PWM��̖��PWM��̖�ٽ��^���·�ӹ����_�P�ܵČ�ͨ���õ�������ݔ��늉��������^��ȫ��ͨ�^DSP�Ȳ��Ĕ��ֿ��ƣ�ͨ�^�O�ú��m��PID���������Եõ��ܺõĄӑB���ԡ�
���ֲɘ�
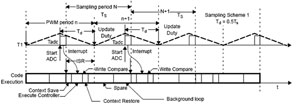
�D3 DC/DC׃�Q�����ֲɘ�ԭ��
�������ֿ����вɘӕr�̵��xȡ�����Ʋ�����������Ҫ�����x���D3չʾ����DC/DC׃�Q������κ������O��ADC���D�Q�r�̣����ڵõ��ʴ_�IJɘ�ֵ���ψD��T1���Ɍ��Qģʽ��PWM����T1�ı��^�Ĵ��������Á������Ҫ���ɵ�PWM����ռ�ձȣ�ͨ�^��׃���^�Ĵ�����ֵ���Ϳ��Եõ�����ռ�ձȵ�PWM�����ڱ�����ADC�Ŀ��ƼĴ����O�õ��D�Q�|�l�l����ADC�����ص����g̎��Ҳ�����_�P�܌�ͨ�����g�r�̣�ADC�D�Q���֮��,�����|�lһ���Д࣬���Д�����ӳ����У��Ñ������ADC�ĽY���Ĵ������xȡAD���D�Q�Y�������Д��ֿ�����������PWM����ݔ��ռ�ձȣ��µ�PWM����Ч�l������һ�����ڡ��ڈD3���Կ������Ŀ�����������PWM�����µ���ADC�Д��|�l���R���@���g�кܶ���e�r�g���@����ζ�����ϵ�y�Î�������Ԓ�����@���g���Լ������Ŀ����������ƶ�·��DC/DC׃�Q������Background Loop�п��Ԉ����������Ñ�������ͨ�ŵȡ�
PID����
����TI�ṩ�Ĕ����Դ�_�l�����п��������㷨�꣬ԓ����ControlLawMacro.h�^�ļ��У��ǻ���һ��2P/2Z���f������
����
����PID�xɢ���ı��_ʽ������ʾ��
����![]()
����2P/2Z���f������
����
������Ҋ��PIDֻ��2P/2Z��һ��������A1=-1��A2=0
������ôPID��ϵ����������ʾ��
����Coef2P2Z_1[0] = Dgain * 67108 // B2
����Coef2P2Z_1[1] = (Igain - Pgain - Dgain - Dgain)*67108 // B1
����Coef2P2Z_1[2] = (Pgain + Igain + Dgain)*67108 // B0
����Coef2P2Z_1[3] = 0; // A2
����Coef2P2Z_1[4] = 67108864; // A1
����Coef2P2Z_1[5] = Dmax[1] * 67108; // Clamp Hi limit (Q26)
����Coef2P2Z_1[6] = 0x00000000; // Clamp Lo
�����Ñ�����ͨ�^���x���߸�׃Pgain��Igain��Dgain���팍�F�����㷨���{�����鷽���{ԇ����CCS�п��Ԍ������ą��������M�ȗl��ͨ�^�����M�ȗl�ķ�ʽ�팍�Fϵ�y�Č��r�{ԇ��
ܛ�����
����ܛ�������D4��ʾ��

�D4 ܛ�����
�OӋ����
�����OӋ������D5��ʾ�����OӋ���������c��
�D5 �OӋ����
������ �����Ӱ��ĸ����B�ӷ�ʽ
������ �Ӱ����TMS320F28044������
������ ĸ���d��10·����BUCK�·��ÿ·�^��ؓ�d���1A
������ ����һ·늉�ܛ���ɾ��̣����̷����^���^5V
������ �ɄӑB��׃����늉�
������ �ɄӑB��׃ϵ�y��PID�������{ԇϵ�y�ӑB���ܡ���
�� �����óɸ߾���PWM����ͨPWMݔ���ɷN��ʽ)
���P��x:
- ...2015/02/12 15:18������TCN�ĸ�����܇�W�j�T����ϵ�y�OӋ
- ...2012/04/09 17:23�����ڣԣ���ģ�͵ķǾ��ԣΣãӂ������������OӋ
- ...2012/04/09 16:08�����ڣԪ���ģ����Ƿ�әCе�۵�ƽ�����
- ...2012/03/27 16:24�����ڣԣ�ģ���^��ģ�͵ĺ������ˑB����
- ...2012/03/13 15:55�����ڣԣ�������컬ģ�����������OӋ������
- ...2012/02/03 11:33������TMS320X2812�ĸ߾����D�ǜy��ϵ�y�OӋ
- ...���D��Ԕ����܇�x���屳���܇Ҏ����ȫ�OӋҪ��
- ...��ʹ���а�ȫ���ϵ��W��惦������ȫ����܇ϵ�y
- ...������ƫ�ò�־��Ԃ��������^���Mչ�͑���
- ...�����¿�˹�y�uijƷ�����ܲ����������C����ƪ
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�(�m)
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�
- ...��RTD�y��ϵ�y�Є�����ʧ���Ӱ�
- ...���{��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^�e



- ...�� ��о�������ø�Уδ����܇�˙C�����OӋ��ِ������ʽ����
- ...�� ̽�صڶ����l�{ɽ�������¡�������ԇ�gՓ����
- ...�� ��2018�Ї��댧�w���B朴�����ڽ��Kʡ�����e��
- ...�� �����}��Ҏ����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�������ܵ�����
- ...�� �ⷨ�댧�w��ST����Cinemo��Valens��CES 2018չ������ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a�I���°lչ�߷�Փ�������ھ����_
- ...�� ����늙C���ݳ���PCIM����2017չ
- ...�� GPGPU���a������Ї�оƬ�a�I�Ŀհ؎�
- ...�� ���W�aƷ�OӋ��Wi-Fi�B�ӵ��Ă��P�I����
- ...�� �������Ї�MEMS���܂������a�I�lչ��������ڰ������_�Ļ
- ...�� IAIC���ِ���[���Ї�о�����Ä��£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �yԇ���g
- ...�� �����Ј��������L�Ƅ�Molex�ӏ���܇�I��İlչ
- ...�� �Ї��Gɫ�����˳���������_�ڼ� ���a�W���ù�̽�Gɫ�lչ��ģʽ
- ...�� Efinix® ȫ����AI߅��Ӌ�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r���aƷ�Uչ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M���������I�ǻ�������
- ...�� ��늮aƷ�_�l���yԇ��ӑ����������Դ�����ɹ��e��
- ...�� Manz���ǿƼ�����댧�w�I�� ����弉�ȳ��ͷ��b�ṩ���W���Ƴ̡�Ϳ�������⑪�õ����a�O���Q����
- ...�� ������ABITRODE����늳yԇϵ�y���������������Դ
- ...�� ������AFTFϵ��늳yԇϵ�y�И˱�������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ�dϵ�y�ɹ����������؈
- ...�� ������A���H��늄���܇���P�I�����y�u��ӑ�������[���M�y�u���g




- ...�� �����ɼ��K��ϵ�y�O��
- ...�� ���x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|�J�C����܇ϵ�ЮaƷӋ��
- ...�� ���`˼® �����U������� ⁽�ϵ��™ FPGA �aƷ ⁽�ϵ�ЮaƷ�U�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_�e� (TSMC) 16�{��ˇ���c��Ƭ
- ...�� TI��2019��ȫ����W������OӋ��ِ�C����Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C�@��ȫ���ׂ���܇��ȫ�����Եȼ�(ASIL) ��D���J�C
- ...�� ���R��܇�x��BlackBerry������һ����܇