
����TMS320X2812�ĸ߾����D�ǜy��ϵ�y�OӋ
����1 ����
�����߾������D�ǜy���V�������ھ��ܼӹ������պ����܊�µ��I�y���ǶȺͽ�λ�Ƶķ����У�ˮ�ʹ�ʽ�A�ǃx���A����Լ���葪׃ʽ��늸�ʽ�����ʽ����늾��aʽ������ʽ�Ƚ�λ�Ƃ�������Ŀǰ�����ÈA��ŷ������F�ĸ߾����S�D�ǜy��ϵ�y����Y�����Σ��������㣬�y�����ȸߵ����c���õ��V�����á��@�����һ�N���ڈA��ŵķǽ��|ʽ�S�D��λ�Ɯy��ϵ�y�OӋ���������һ��DSP̎����TMS320X 2812�M�Д���̎�������ƣ�ʹ�ý�λ�ƵĜy��ϵ�y���нY�����Σ��`���ȸߣ�����С��푑��죬�y�������V�������ܻ�������늴Ÿɔ_�����c��
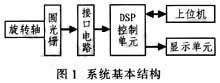
����2 ϵ�y�Y��������ԭ��
�����D 1�o������TMS320X2812��DSP�����D�S��λ�Ɯy��ϵ�y�����Y������Ҫ�����A��š������}�_�ӿ��·��DSP���Ɔ�Ԫ���@ʾ��Ԫ�ȡ��A��ŸМy���y�S���D��λ�Ƶ�׃�����ٌ���λ��׃���D�Q���}�_׃�������ӿ��·���A���ݔ���������}�_���͵�TMS320X2812��DSP���������a�}�_�· (QEP)ģ�K�M�Мy��Ӌ�㣬��ֱ��ͨ�^LCD���a�@ʾ�y���Y����߀�Ɍ��y�������c��λӋ��Cͨ�ţ���ͨ�^DSPݔ���Ŀ�����̖�����Ʊ��y�w�����D��λ�ơ�
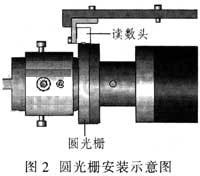
����2.1 �A��ŽY��������ԭ��
�����D 2�o�����͵ĈA��š������ɹ�ŭh(�����)���x���^(ָʾ���)�M�ɡ���ŭh�c�x���^������γ�Ī���l�y�����ÿ�Ƅ�1���ž࣬Ī���l�y���Ƅ�1���l�y�g������Ÿ�׃�\�ӷ���Ī���l�yҲ�S֮��׃�\�ӷ����߾��Ќ������\���Pϵ��ͨ�^�y��Ī���l�y��λ�ƿɫ@ȡ�˳߹�ŵ�λ�������Ƅӷ���
��������������c�x����ŵĊA��θ�dz�С�����Ī���l�y���̞飺
����B=ω��θ (1)
����ʽ�У�B��Ī���l�y�g�ࣻω���ų�����
�����ɗl�y�ƄӔ�ĿN��Ӌ�����ƄӾ��x��
����S=Nω (2)
�������O��ŭh�İ돽��r���t�S���D�ĽǶȞ飺
����β=s��r=NBθ��r (3)
�����@�ӾͿ�ͨ�^Ӌ��ݔ���}�_ͨ�^����D�ӽǶȡ�
����ԓϵ�y��������B20μm�A��ź��c֮����RGH20Xϵ���x���^�M���OӋ��������߾��ȣ��x���^�Ȳ������5����(�ֱ��ʞ�4μm)��ݔ���ăɗl���������}�_������M��4�����֡�RESR�A��ſ̾�ֱ�ӿ��ڈA�h�������(�ž�20μm)��RGH20ϵ���x���^��������B�Ī�һ�o���Ĺ�W�V��ϵ�y�OӋ����������Ⱦ�����ۡ�ָ�y��r���x���������`���ͨ�^���εľ��_�{���@���a����
����2.2 DSP������·
����ԓ�y��ϵ�y��Ӳ���OӋ����TMS320X2812��DSP����ƺ��ĵġ�TMS320X2812��32λ���cDSP�����^�ߵ����l��150MHz���^Сָ�����ڞ�6.67 ns���ⲿ���õ��l�r犣�ͨ�^Ƭ���i��h���l��TMS320X2812�Ȳ��¼�������(EV)ģ�K��QEP��Ԫ��ֱ�ӌ������}�_��̖�g�a���ɷ��㡢���_�،��A���ݔ����̖�M�Д����ɼ���TMS320X2812�Ĵ���ͨ�Žӿ�(SCI)��һ���p��ͨ�Ů�������ͨ�Žӿڣ���p�ٴ���ͨ�ŕrCPU���_�N���䴮��֧��16�����պͰl��FIFO��ԓ�������Ͱl���������p�����_�������и��Ԫ����Ŀ���λ�c�Д�λ��SCI����Ӳ���z��ͨ�Ŕ����O�Ժ͔�����ʽ���ɜp��ܛ��ؓ����
����2.2.1 ����DSP�Ĕ����ɼ�
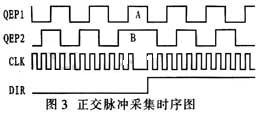
�����A����x���^ݔ����̖������l��׃��������(����λ���90°)���}�_(A��B)��D3��ʾ�������������}�_��̖ݔ�뵽TMS320X2812��QEP1�� QEP2Ӌ�����_��EVģ�K��QEP�·����z�y߉�ɸ���A��B�}�_����λ�Pϵ�a��һ��������̖����ͨ�ö��r���ķ���ݔ�롣���QEP1��ǰ�����r���f��Ӌ������֮���r���f�pӋ����QEP�·����������ݔ���}�_�������غ��½���Ӌ������ˮa���ĕr��l����ÿ��ݔ�����е�4��������ԓ�r�����ͨ�ö�λ��2 ��ݔ��r犣��@�ӿ�ͨ�^QEP��ݔ��Ĺ����̖4���֡�ͨ�ö��r��2���ǏĮ�ǰֵ�_ʼӋ������˿���ʹ��QEPǰ������ֵ�b�d�����xͨ�ö��r����Ӌ�����У����r����ֵ����4�ó��x���^ݔ�����}�_�����Ķ�Ӌ��Ƕȡ�QEP�·��ݔ���}�_�M��4���֣���ʹ��������ı�����λ�ƾ��_��1μm��
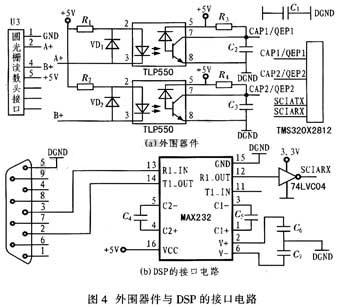
����2.2.2 �ӿ��·�OӋ
����RGH20 �x���^ݔ����̖����늸��x��ֱ���͵�QEP��Ԫ���_�����У���������������TLP550���ٹ�����Ԍ��F�Դ�c�صĸ��x������ͨ�Žӿ��·���÷��� RS-232�˜ʵ�������MAX232�M��ͨ�š�����MAX232���Դ늉���+5V����DSP���Դ늉���3.3 V��������MAX232�cTMS320X2812�g���ƽ�D�Q����74LVC04����D4��ʾ��
����3 ϵ�yܛ���OӋ
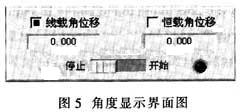
������λ�C���̲���̓�M�x��ܛ���_�lƽ�_LabWindows��CVI������ͨ����̓�M�x��ϵ�y���B��Ӳ���c��λ�C���^���F���^�����ķ�ʽ��LabWindows��CVI�ṩ�Ќ��F����ͨ�ŵČ��T�����졣ԓϵ�y�Dz���SCI�ӿ��cRS232���ڌ��FDSP�cPC�C֮�g�Ĕ���ͨ�ţ���λ�C�ɸ�ۙ�@ʾ�S�ĽǶ�׃�����D5�o���Ƕ��@ʾ���档
����ԓϵ�y����λ�Cܛ���OӋ�\��C�Z�Ծ��̣�����ģ�K���OӋ���������ڹ��ܔUչ����׃���D6�o����������ܛ�����̡����У���ʼ���ӳ�����Ҫ������ϵ�y�r犳�ʼ�����˿ڳ�ʼ�����Д��O�õȣ��ԙz�ӳ������ڌ��Fϵ�y�ij�ʼУ���Ͷ��r����ʼ��������̎���ӳ����У���DSP��ͨ�ö��r��2��Ӌ����ֵ�M�з�����Ӌ����������Եõ������Ľ�λ��ֵ���Y��ݔ���ӳ������ڌ��F��λ��ֵ���@ʾ�����P�I�Ǹ��c��ֵ���D�Q��ԓ�ӳ����ͨ�^���ڌ���λ�Ɣ�����ݔ����λ�C�@ʾ�ʹ惦��

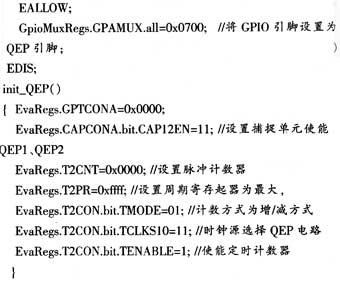
�������½o��QEP�·�ij�ʼ�����̴��a��
����4 �Y�Z
����ԓϵ�y�OӋ����������B�A��ţ����H���F�˽�λ�Ƶķǽ��|�߾��Ȝy��������߀���а��b���Σ��{ԇ���㣬�y�����ȸߣ����ɔ_�������ȃ��c��ԓ�y��ϵ�y���� DSP��QEP��Ԫ���A����x���^ݔ����̖�M��4����Ӌ�����Mһ������˜yԇ���ȣ��侀λ���_1μm��TMS320X2812��DSP��ϵ�y�Ќ��F�y�������IJɼ���̎�����@ʾ���c��λӋ��Cͨ�ţ��������y���Y���Ԅӿ��Ʊ��y���D�w�Ľ�λ�ƣ����ԓ�y��ϵ�y�������ܻ����c���F������ij܊Ʒ�yԇϵ�y�������ڜyԇ�����I��܊�µ��I���и��ߏV���đ���ǰ����
���P��x:
- ...2015/02/12 15:18������TCN�ĸ�����܇�W�j�T����ϵ�y�OӋ
- ...2012/04/09 17:23�����ڣԣ���ģ�͵ķǾ��ԣΣãӂ������������OӋ
- ...2012/04/09 16:08�����ڣԪ���ģ����Ƿ�әCе�۵�ƽ�����
- ...2012/03/27 16:24�����ڣԣ�ģ���^��ģ�͵ĺ������ˑB����
- ...2012/03/13 15:55�����ڣԣ�������컬ģ�����������OӋ������
- ...2011/12/02 16:57������TMS320LF2407����Ȼ��l�әC����ϵ�y�OӋ
- ...���D��Ԕ����܇�x���屳���܇Ҏ����ȫ�OӋҪ��
- ...��ʹ���а�ȫ���ϵ��W��惦������ȫ����܇ϵ�y
- ...������ƫ�ò�־��Ԃ��������^���Mչ�͑���
- ...�����¿�˹�y�uijƷ�����ܲ����������C����ƪ
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�(�m)
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�
- ...��RTD�y��ϵ�y�Є�����ʧ���Ӱ�
- ...���{��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^�e



- ...�� ��о�������ø�Уδ����܇�˙C�����OӋ��ِ������ʽ����
- ...�� ̽�صڶ����l�{ɽ�������¡�������ԇ�gՓ����
- ...�� ��2018�Ї��댧�w���B朴�����ڽ��Kʡ�����e��
- ...�� �����}��Ҏ����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�������ܵ�����
- ...�� �ⷨ�댧�w��ST����Cinemo��Valens��CES 2018չ������ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a�I���°lչ�߷�Փ�������ھ����_
- ...�� ����늙C���ݳ���PCIM����2017չ
- ...�� GPGPU���a������Ї�оƬ�a�I�Ŀհ؎�
- ...�� ���W�aƷ�OӋ��Wi-Fi�B�ӵ��Ă��P�I����
- ...�� �������Ї�MEMS���܂������a�I�lչ��������ڰ������_�Ļ
- ...�� IAIC���ِ���[���Ї�о�����Ä��£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �yԇ���g
- ...�� �����Ј��������L�Ƅ�Molex�ӏ���܇�I��İlչ
- ...�� �Ї��Gɫ�����˳���������_�ڼ� ���a�W���ù�̽�Gɫ�lչ��ģʽ
- ...�� Efinix® ȫ����AI߅��Ӌ�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r���aƷ�Uչ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M���������I�ǻ�������
- ...�� ��늮aƷ�_�l���yԇ��ӑ����������Դ�����ɹ��e��
- ...�� Manz���ǿƼ�����댧�w�I�� ����弉�ȳ��ͷ��b�ṩ���W���Ƴ̡�Ϳ�������⑪�õ����a�O���Q����
- ...�� ������ABITRODE����늳yԇϵ�y���������������Դ
- ...�� ������AFTFϵ��늳yԇϵ�y�И˱�������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ�dϵ�y�ɹ����������؈
- ...�� ������A���H��늄���܇���P�I�����y�u��ӑ�������[���M�y�u���g




- ...�� �����ɼ��K��ϵ�y�O��
- ...�� ���x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|�J�C����܇ϵ�ЮaƷӋ��
- ...�� ���`˼® �����U������� ⁽�ϵ��™ FPGA �aƷ ⁽�ϵ�ЮaƷ�U�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_�e� (TSMC) 16�{��ˇ���c��Ƭ
- ...�� TI��2019��ȫ����W������OӋ��ِ�C����Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C�@��ȫ���ׂ���܇��ȫ�����Եȼ�(ASIL) ��D���J�C
- ...�� ���R��܇�x��BlackBerry������һ����܇