
����Nios II�ęC����ҕ�X�ŷ����������о��c�OӋ
����Altera��˾��Nios II̎�����ǿɾ���߉������ܛ��̎������NiosIIܛ��̎�����ʹ惦����I��O�ӿڵ����O��Ƕ�뵽FPGA�У��M��һ���ɾ��̆�оƬϵ�y��SOPC���������ϵ�y�ijɱ����w�e���ġ��m�ϾW�j����š�����ͨ�š�Ƕ��ʽ�����M�Ј��ȸ��NǶ��ʽ���È��ϡ�
�����������һ������Nios II̎�����Y����ϵ�y���ڌ��F�C���ˌ��r�\�әz�y��ۙ��ʹ�þ��Կ������V�����㷨����������\�ӹ�Ӌ���Mһ��������У�����㷨�еij˳�����MATLAB��DSP Builder���ɵ�ģ�K����Nios II̎�������Զ��xָ����OӋ������
�����C����ҕ�X�ŷ����������о��c�OӋ
�����C����ҕ�X�ŷ����ƾ����ø��N����ϵ�y����ҕ�X��������ݔ��������ֶΣ����ɸ���̎����������X���������̎���ͽ�ጣ����^�K�о�Ŀ�˾���ʹ�C����ҕ�X�ŷ��������������ǘ�ͨ�^ҕ�X�^����������磬���������m���h����������������ҕ�X���кͷ�������ij�N�̶ȵ��������һ�����΄ա�
����ϵ�yӲ�����F
��������SOPC�ęC����ҕ�X�ŷ�����������Ҫ��FPGA���惦�������O�������֣���D1��ʾ��
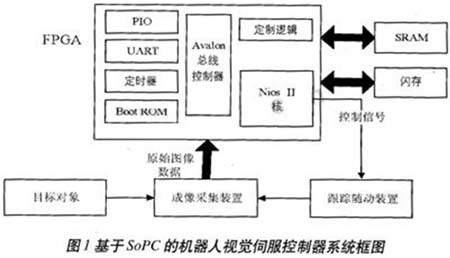
�����z���^λ�ù̶��������ܲɼ��D��ķ����Q��ҕ�X�^���{���z��Cʹҕ�X�^���w�C���˵Ĺ������g�����C����Ҫ��ۙ��������ԓҕ�X�^��ȡ����Ôz��C�ɼ��D����ϵ�y���ɼ��ĈD���M��̎������������ȡ���xɢ�IJɘ��c���У��^���ٸ����ɘ��c����Ҏ���C���˵��\��·�������У�FPGA���ֺ�����Nios II̎����Core����һ���Ƕ��ʽϵ�y�_�l�У�����Ҫ�µ����Oģ�K�r������Ҫ��PCB�ϼ������������OоƬ���ߓQ�ø��ߙn��CPU����SOPC�OӋ����ͬһ��FPGAоƬ�ȼ������������Oģ�K�ˣ���ͨ�^��Ƭ�ϵ�Avalon�����cNios��̎����Core���B���������Ҫ��PCB�@����������������ġ�����ɼ��b�Ï�Ŀ�ˌ�������вɼ��D�����У�������SOPC��Ƭ��惦���У�Ȼ������Nios��̎�����Ͷ��Ƶij˷���������DSP�\��ָ��팍�F���ο������V�������㷨���Ķ����F�\��Ŀ�˵��R�e�c��ۙ��
����ϵ�yܛ���Č��F
�����xɢ���Կ������V���㷨
�������Կ������V�����������̎�Kalman�ھ����^С�����Ӌ�Ļ��A�ϣ�����Ĕ��W�Y���ϱ��^���ε��^�������f�ƞV������������Ӌ�������惦���ͣ����r�Ըߵă��c���e�ǽ��v�˳�ʼ�V�����^�ɠ�B�V��Ч���dz��á�
�������Կ������V�������㷨���£��Oһ�S�C�ӑBϵ�y���䔵�Wģ�͞飺
![]()
������ʽ1��x��k����ϵ�y��Bʸ����w��k����ϵ�y����ʸ��,�գ�k��,����k����ϵ�y���,��ʽ2��Z��k����ϵ�y�^�yʸ����H��k����ϵ�y�^�y��ꇣ�V��k����ϵ�y�^�y������ꇡ�
�����P��ϵ�y���S�C�ԣ����ļٶ���ϵ�y�������^�y�����Dz����P�����ֵ��˹�������S�Cϵ�y�Ġ�B��Ӌ���}�����Ǹ����x���Ĺ�Ӌ�ʄt�ͫ@ȡ�Ĝy����Ϣ��ϵ�y��B�M�й�Ӌ���������V���Ĺ�Ӌ�ʄt�ǣ�
��������![]() ������Ӌ
������Ӌ![]() ��x��k���oƫ���^С��������@�ɂ��ʄt���ƌ�����ϵ�y�������ĞV���㷨������
��x��k���oƫ���^С��������@�ɂ��ʄt���ƌ�����ϵ�y�������ĞV���㷨������
�����A�y�`��̞飺
���������ꇷ��̞飺

�����V���`���ꇞ飺
![]()
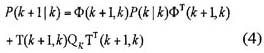
����������ʽ��I�dž�λ��ꇣ�Q��w��k���ԅf�����ꇣ�R��V��k���ԅf�����ꇡ��������V�������f���㷨��Ӌ���^���V��ֵ�r��K��k+1����P��k+1|k�����_����P��k+1|k����P��k�����_����P��k+1����P��k+1|k����K��k+1�����_������˷����f���\�㡣
����ϵ�y��������
������ϵ�y����Ҫ����������\��Ŀ�˵��i�����������\��ƽ�_��Ŀ���M�Ќ��r��ۙ��ʹ�ø�����NiosII̎�����������������������ϵ�y�Č��F���̺�Ч�ľ��Կ������V���㷨��Ŀ���\�Ӆ����Ĺ�Ӌ����Ч������ˈD��̎���ٶȣ����F���\��Ŀ�˵Ŀ��ٸ�ۙ��������ϵ�y���̣�
����1��ϵ�y��ʼ������SOPCͨ�^���ƿ����O��USB�ӿ��͔z���^����ģʽ������ʼ�������س���׃����
����2���_���\�Ӆ^����Nios II̎���������D�������i���\�����w����������ۙ���w�_���\�Ӹ�ۙ�^�g�������ĸ�ۙ�����������@����ۙ�������M�С�
����3���A�yӋ�㣺���þ��ο������V���������M��Ӌ�㡣
����4���V�����A�y�͞V��������õģ����ɞV���õ��A�y�����A�y�ֿɵõ��V����
����5��ݔ����SOPC�l��������̖�o�S��ƽ�_��
����ԓϵ�y���ü�����Niosܛ��̎������Stratix���ܶ�FPGA��������ͨ�^�z���^ӛ�ÿһ�r���\��Ŀ�˵�λ�ú��ٶ������^�yֵ��Ȼ���չ�ʽ��3������4������5������6���M���^�Ѡ�B��Ӌ���õ�ÿһ�r���\��Ŀ�˵�λ�ú��ٶȵ��A�yֵ�����ڸ��N�ɔ_���صĴ��ڣ����^�߰˂��r�g�κ��A�yλ���c�^�yλ���ஔ�ӽ������Ɍ��F�ʴ_�Ġ�B�A�y��
�����Y�Z
���Ľ�����һ����SOPC�Y���Ķ��P���C����ҕ�X�ŷ�ϵ�y����Ҫ���þ��Կ������V���㷨�ɹ����A�y���\��Ŀ�˵Ġ�B�����������i���\��Ŀ�ˣ����F��Ŀ���M�Ќ��r��ۙ�����ڑ��ÿ������V����O��ؿsС���������g���p����ϵ�y�ĈD��̎��r�g��������Ч�����ϵ�y�Č��r�ԣ����F���\��Ŀ�˵Ŀ��ٸ�ۙ��
���P��x:
- ...2013/09/25 16:49����ɭ���댧�w����NCP1246��NCP4354�ʹ��C�ܺ��Դ�m��������
- ...2013/03/27 10:10������NI PXI Expressƽ�_��ʯ�ͺϔD��ԇ�C�����c�����ɼ�ϵ�y�
- ...2012/08/13 15:04������NI CompactRIO��̫����۠t���ܻ����ƺ͔����ɼ�ϵ�y
- ...2011/12/09 12:19������NI LabVIEW���ԄӸ�ݙC
- ...2011/11/28 14:39������nRF2401��������Ϣ�x�������о�
- ...2011/10/08 13:45������nRF905��LED���o��ͨ���OӋ�c���F
- ...���D��Ԕ����܇�x���屳���܇Ҏ����ȫ�OӋҪ��
- ...��ʹ���а�ȫ���ϵ��W��惦������ȫ����܇ϵ�y
- ...������ƫ�ò�־��Ԃ��������^���Mչ�͑���
- ...�����¿�˹�y�uijƷ�����ܲ����������C����ƪ
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�(�m)
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�
- ...��RTD�y��ϵ�y�Є�����ʧ���Ӱ�
- ...���{��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^�e



- ...�� ��о�������ø�Уδ����܇�˙C�����OӋ��ِ������ʽ����
- ...�� ̽�صڶ����l�{ɽ�������¡�������ԇ�gՓ����
- ...�� ��2018�Ї��댧�w���B朴�����ڽ��Kʡ�����e��
- ...�� �����}��Ҏ����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�������ܵ�����
- ...�� �ⷨ�댧�w��ST����Cinemo��Valens��CES 2018չ������ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a�I���°lչ�߷�Փ�������ھ����_
- ...�� ����늙C���ݳ���PCIM����2017չ
- ...�� GPGPU���a������Ї�оƬ�a�I�Ŀհ؎�
- ...�� ���W�aƷ�OӋ��Wi-Fi�B�ӵ��Ă��P�I����
- ...�� �������Ї�MEMS���܂������a�I�lչ��������ڰ������_�Ļ
- ...�� IAIC���ِ���[���Ї�о�����Ä��£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �yԇ���g
- ...�� �����Ј��������L�Ƅ�Molex�ӏ���܇�I��İlչ
- ...�� �Ї��Gɫ�����˳���������_�ڼ� ���a�W���ù�̽�Gɫ�lչ��ģʽ
- ...�� Efinix® ȫ����AI߅��Ӌ�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r���aƷ�Uչ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M���������I�ǻ�������
- ...�� ��늮aƷ�_�l���yԇ��ӑ����������Դ�����ɹ��e��
- ...�� Manz���ǿƼ�����댧�w�I�� ����弉�ȳ��ͷ��b�ṩ���W���Ƴ̡�Ϳ�������⑪�õ����a�O���Q����
- ...�� ������ABITRODE����늳yԇϵ�y���������������Դ
- ...�� ������AFTFϵ��늳yԇϵ�y�И˱�������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ�dϵ�y�ɹ����������؈
- ...�� ������A���H��늄���܇���P�I�����y�u��ӑ�������[���M�y�u���g




- ...�� �����ɼ��K��ϵ�y�O��
- ...�� ���x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|�J�C����܇ϵ�ЮaƷӋ��
- ...�� ���`˼® �����U������� ⁽�ϵ��™ FPGA �aƷ ⁽�ϵ�ЮaƷ�U�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_�e� (TSMC) 16�{��ˇ���c��Ƭ
- ...�� TI��2019��ȫ����W������OӋ��ِ�C����Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C�@��ȫ���ׂ���܇��ȫ�����Եȼ�(ASIL) ��D���J�C
- ...�� ���R��܇�x��BlackBerry������һ����܇