
����PCI-9846H�����^(q��)�r�g�����늉����λ�׃���о�
�γ��⣬�Ώ��������� ����������W(xu��)���Cе�c܇�v�W(xu��)Ժ��������100081
����
늙C�(q��)��ϵ�y(t��ng)��늄���܇�ĺ��IJ���[1-2]������ʹ��늙C����Ϳ��Է֞�ֱ��늙C�(q��)��ϵ�y(t��ng)�ͽ���늙C�(q��)��ϵ�y(t��ng)[3]��������늙C�(q��)��ϵ�y(t��ng)�У��Б�(y��ng)늙C���ױ����ܣ�ʹ���^�V��������ͬ��늙C�����䱾���ĸ������ܶ��c��Ч�ʣ����б��^��ĸ�����(y��u)�ݣ���(y��ng)�÷����������ࡣ
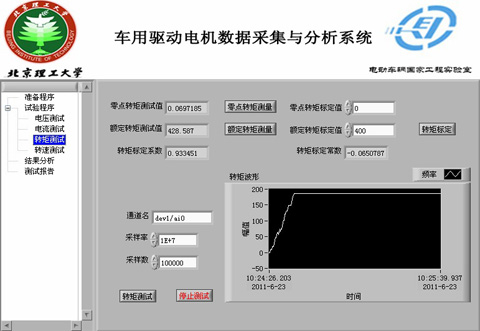
���˝M����܇��������Ҫ��늙C�(q��)��ϵ�y(t��ng)Ҫ���^�ߵĄӑB(t��i)���ܣ�Ŀǰ���^�ɹ��Ŀ��Ʋ����������ڷ�(w��n)�B(t��i)ģ�͵�׃�l׃�����ƣ�VVVF�������ڄӑB(t��i)ģ�͵Ĵň�������ƣ�FOC���Լ�ֱ���D(zhu��n)�ؿ��ƣ�Direct Torque Control����DTC��������ֱ���D(zhu��n)�ؿ�������ʸ�����ƻ��A(ch��)֮�ϰl(f��)չ�����ģ�����Ҫ��(y��u)�c�ǣ�����ʸ�������еĽ���˼�룬ֱ�ӿ���늄әC�Ĵ�机��D(zhu��n)�أ������ö��Ӵ�朶��������ʸ�������е��D(zhu��n)�Ӵ�朶����_��늄әC�в��״_���ą���(sh��)(�D(zhu��n)������)�R�e��Ŀǰ����(n��i)�������ͬ��늙C�Ĕ�(sh��)�W(xu��)ģ��ֻ�ǻ����о����ӳ��������Q�@�M�l���£������D(zhu��n)�Ӵ�朡�����©���������@�M�Ļ��ж������ģ��������S�м������sɢ�p���Լ�PWM�������،�늙C��Ӱ푣���˻���ԓ늙Cģ�ͽ����Ŀ��Ʋ�����늙C�ĵ����}�ӡ��������š���(w��n)���Ժ�ݔ���D(zhu��n)��һ���Եȷ���߀�����T�����}[5]�������ܸ��õĽ�Qֱ���D(zhu��n)�ؿ�����늙C�ĵ����D(zhu��n)���}�ӵĆ��}�����Ľ�����������׃�����^(q��)�r�g��늙Cģ�ͣ�ͨ�^�����^(q��)�r�g�Įa(ch��n)�������ÙC���M�з������ó�����ݔ��늉����λ�׃�Լ���λ׃�����P(gu��n)�IӰ����ӣ�ᘌ�����Y(ji��)�����һ�N�pС���^(q��)�r�g����늉����λ�׃�ķ�����ͨ�^��(y��ng)��PCI-9846H�������������늉����������D(zhu��n)�x��늙C������������y���C���O(sh��)�����܇��늙Cԇ�ƽ�_�Ĵ����λ�Cͨ�^LABVIEW������(sh��)��(j��)�ɼ�ϵ�y(t��ng)��ͨ�^��늉���������D(zhu��n)�ء��D(zhu��n)����Ϣ�IJɼ��c����������������ĜpС���^(q��)�r�g��ݔ��늉����λ�׃�ķ����M������C��
1.��׃�����^(q��)�r�g���о�
1.1��׃�����^(q��)�r�g�a(ch��n)���C��
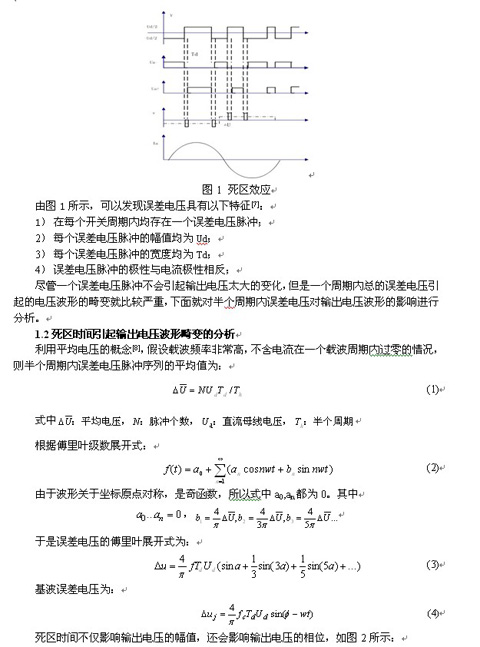
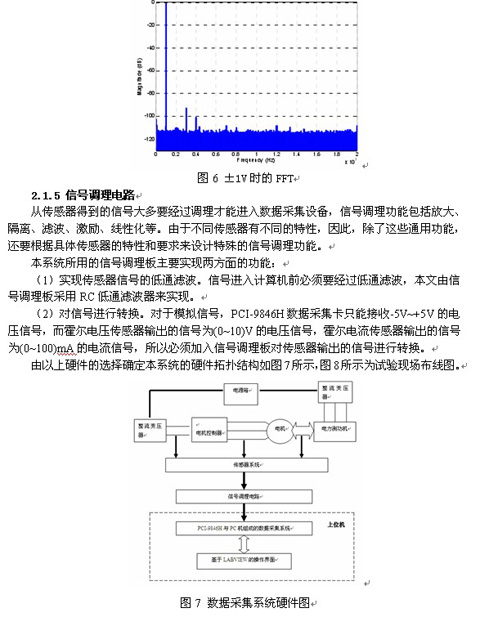
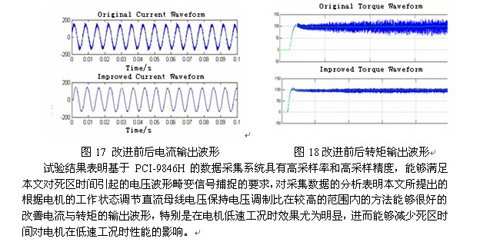
��������ͬ��늙C�(q��)�Ӷ��ԣ���IGBT���������r��������ǽ��滥�a��(d��o)ͨ�ġ��ڽ����^���б�횴��������ͬ�r�P(gu��n)�]�Ġ�B(t��i)���_������/��ی�(d��o)ͨǰ������(y��ng)�Ļ��a��/�Ϙ�ۿɿ��P(gu��n)�࣬�@�����ɂ����ͬ�r�P(gu��n)��ĕr�g�Q�����^(q��)�r�g��ᘌ�Ŀǰ�Ј���IGBT���{(di��o)�аl(f��)�F(xi��n)����׃�����^(q��)�r�gһ���3��7��s[6]����늙C������һ���D(zhu��n)�����ϕr�����ڻ���늉��������^(q��)Ч��(y��ng)������늉�Ӱ��^С�����Բ����˂�����ҕ����늙C�����ڵ��ٕr������늉���С�����^(q��)Ч��(y��ng)������늉�Ӱ������^�����^(q��)�r�gԽ�L����׃��ݔ��늉��ēp��Խ��늉����εĻ�׃�̶�Ҳ��׃����֮�����^(q��)�r�g߀��Ӱ�ݔ��늉�����λ��ʹPWM���β��ٌ��Q�����ģ����늙C�p�����ӣ�Ч�ʽ��ͣ�ݔ���D(zhu��n)���}�ӵȡ��D1��ʾ�����^(q��)�r�g�a(ch��n)���ęC���Լ���ݔ��늉���Ӱ푣�����V�������PWM늉�ݔ�����Σ�Ua-��ؓ(f��)ĸ���
����Ua+����ĸ��늉���v���`��늉���Ia��ݔ�������
�����īI
[1]�O�괺����Ϧ��.늄���܇�����(q��)��ϵ�y(t��ng)�F(xi��n)��l(f��)չ[J].��܇���̣�2000��022(004)��220��224��229.
[2]����.늄���܇�����Б�(y��ng)늙C�(q��)�ӿ���ϵ�y(t��ng)���������о�[D].����������W(xu��):2004
[3]C.C.Chan��K.T.Chau. Modern Electric Vehicle Technology.
[4]�Ώ�.늄�܇�v�����(q��)��ϵ�y(t��ng)�yԇƽ�_�O(sh��)Ӌ�_�l(f��)��ԇ��о�[D].����������W(xu��):2004.
[5]����.늂����Ď�܇�v����ͬ��늙C���Ƽ��g(sh��)�о�[D].����������W(xu��):2010
[6]Choi.J.W, "Inverter output voltage synthesis using novel dead time compensation",IEEE
Transaction on Power Electronics, Vol.11:221-227, 1996.
[7]��������.��׃�����^(q��)�r�g������ͬ��늄әCϵ�y(t��ng)��Ӱ�[J].��늙C,2001.3:12-15.
[8]�½��h.���^(q��)�r�g��ݔ��늉���Ӱ푷���[J].�����Ӽ��g(sh��),2007.8:31-33.
[9]��M��.܇�v늂���ԇ��_��(sh��)��(j��)�ɼ�ϵ�y(t��ng)���_�l(f��)[D].����������W(xu��):2004�о�[D].����������W(xu��):2010
[6]Choi.J.W, "Inverter output voltage synthesis using novel dead time compensation",IEEE
Transaction on Power Electronics, Vol.11:221-227, 1996.
[7]��������.��׃�����^(q��)�r�g������ͬ��늄әCϵ�y(t��ng)��Ӱ�[J].��늙C,2001.3:12-15.
[8]�½��h.���^(q��)�r�g��ݔ��늉���Ӱ푷���[J].�����Ӽ��g(sh��),2007.8:31-33.
[9]��M��.܇�v늂���ԇ��_��(sh��)��(j��)�ɼ�ϵ�y(t��ng)���_�l(f��)[D].����������W(xu��):2004
���P(gu��n)��x:
- ...2015/02/12 15:10������PSO-LSSVM�ij��Еr��ˮ���A(y��)�y
- ...2014/12/31 13:14�����ڣУ�����W(w��ng)�������������\��ݔ���Ʋ���
- ...2013/12/18 10:49������PCI-9846������(sh��)��(j��)朜yԇ���g(sh��)���о������F(xi��n)
- ...2012/12/26 10:33������PCI-9846��׃�l��ݔ�����ܜyԇϵ�y(t��ng)
- ...2012/04/27 10:12�����ڣУã����ˣƣã� �Ĵ������͙C�����\��
- ...2012/04/12 10:39�����ڣУãӣ���ˮ������ĥ�O(ji��n)��ϵ�y(t��ng)�O(sh��)Ӌ
- ...���D��Ԕ����܇�x���屳���܇Ҏ(gu��)����ȫ�O(sh��)ӋҪ��
- ...��ʹ���а�ȫ���ϵ��W��惦��(g��u)����ȫ����܇ϵ�y(t��ng)
- ...������ƫ�ò�־��Ԃ��������^���Mչ�͑�(y��ng)��
- ...�����¿�˹�y�uijƷ�����ܲ����������C����ƪ
- ...���������ʽ�ضșz�y���y��ϵ�y(t��ng)�Є�����ʧ���Ӱ�(�m(x��))
- ...���������ʽ�ضșz�y���y��ϵ�y(t��ng)�Є�����ʧ���Ӱ�
- ...��RTD�y��ϵ�y(t��ng)�Є�����ʧ���Ӱ�
- ...���{(l��n)��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^(q��)�e
- ...��IoT�W(w��ng)�P(gu��n)ƽ�_�c��(y��ng)��
- ...��������ARM DesignStart��ͨ���ƻ�SoC���^�졢�^���L(f��ng)�U֮·
- ...�����w�����D(zhu��n)��O2O���}�����������ܻ�ˮƽ�ĺ�������
- ...���N܇��LED�(q��)�ӷ����ı��^
- ...���{(l��n)���䌦�ڶ�ƪ��������ɷ���
- ...��������A�Ƴ��I(l��ng)�ȵğo����(sh��)��(j��)�ɼ���Q����
- ...����ɭ���댧(d��o)�w����Ј�څ�ݵğo����늷���
- ...����ɭ���댧(d��o)�w�����܇�����O(sh��)Ӌڅ�ݵĽ�Q����



- ...�� ��о��(chu��ng)�����ø�Уδ����܇�˙C�����O(sh��)Ӌ��ِ������ʽ����
- ...�� ̽�صڶ����l(w��i)�{(l��n)ɽ������(chu��ng)�¡�������ԇ�g(sh��)Փ����
- ...�� ��2018�Ї��댧(d��o)�w���B(t��i)朴�����ڽ��Kʡ�����e��
- ...�� �����}��Ҏ(gu��)����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�(chu��ng)������ܵ�����
- ...�� �ⷨ�댧(d��o)�w��ST����Cinemo��Valens��CES 2018չ��(li��n)����ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a(ch��n)�I(y��)��(chu��ng)�°l(f��)չ�߷�Փ�������ھ����_
- ...�� ����늙C���ݳ���PCIM����2017չ
- ...�� GPGPU���a(ch��n)������Ї�оƬ�a(ch��n)�I(y��)�Ŀհ؎�
- ...�� ��(li��n)�W(w��ng)�a(ch��n)Ʒ�O(sh��)Ӌ��Wi-Fi�B�ӵ��Ă��P(gu��n)�I����
- ...�� �������Ї�MEMS���܂������a(ch��n)�I(y��)�l(f��)չ��������ڰ������_�Ļ
- ...�� IAIC���ِ���[���Ї�о����(y��ng)�Ä�(chu��ng)�£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �yԇ���g(sh��)
- ...�� �����Ј��������L�Ƅ�Molex�ӏ���܇�I(l��ng)��İl(f��)չ
- ...�� �Ї��Gɫ����(li��n)�˳���������_�ڼ� ���a(ch��n)�W(xu��)���ù�̽�Gɫ�l(f��)չ��ģʽ
- ...�� Efinix® ȫ���(q��)��AI߅��Ӌ�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r���a(ch��n)Ʒ�Uչ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M���������I(l��ng)�ǻ�������
- ...�� ��늮a(ch��n)Ʒ�_�l(f��)���yԇ��ӑ����������Դ�����ɹ��e��
- ...�� Manz���ǿƼ�����댧(d��o)�w�I(l��ng)�� ����弉�ȳ��ͷ��b�ṩ���W(xu��)���Ƴ̡�Ϳ�������⑪(y��ng)�õ����a(ch��n)�O(sh��)���Q����
- ...�� ������ABITRODE����늳yԇϵ�y(t��ng)���������������Դ
- ...�� ������AFTFϵ��늳yԇϵ�y(t��ng)�И�(bi��o)��������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ(f��)�dϵ�y(t��ng)�ɹ����������؈
- ...�� ������A���H��늄���܇���P(gu��n)�I�����y�u��ӑ�������[���M�y�u���g(sh��)




- ...�� ��(sh��)��(j��)�ɼ��K��ϵ�y(t��ng)�O(sh��)��
- ...�� ���x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|(zh��)�J(r��n)�C����܇ϵ�Юa(ch��n)ƷӋ��
- ...�� ���`˼® �����U������� ⁽�ϵ��™ FPGA �a(ch��n)Ʒ ⁽�ϵ�Юa(ch��n)Ʒ�U�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_�e� (TSMC) 16�{��ˇ��(ji��)�c��Ƭ
- ...�� TI��2019��ȫ����W(xu��)������O(sh��)Ӌ��ِ�C����Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C�@��ȫ���ׂ���܇��ȫ�����Եȼ�(ASIL) ��D���J(r��n)�C
- ...�� ���R��܇�x��BlackBerry������һ����܇