
TLK6002/10002 Local Deep Loopback ��ԭ����ע�����
�P�I�֣�����
Peter Wei
ժҪ
TI �ṩ��TLK6002, TLK10002 �ȶ�N���ʵ�ͨ��Serdes оƬ���ڲ�ͬ���I��õ��ˏV���đ��á��e�ڹ��w���h�đ����У�����TLK6002, TLK10002 ���ص������`���Ժ̓������m�䌒�ݶȣ��ѳɞ�I����������á�
TLK6002, TLK10002 ���ṩ�˰�����������ȭh�ء��������˜\�ȭh�ء������h����ȭh�ء��͡��h�˜\�ȭh�ء��ڃȵĶ�N�h��ģʽ�������OӋ�����{ԇ�^�������ڌ��Hʹ����Ѹ�ٶ�λ���ρ�Դ���������_�l���y�ȣ��������Ŀ���O����S�o�ԡ�
��ͬ�ĭh��ģʽ�H�H��Ҫͨ�^���چ������üĴ������ü��Ɍ��F�����ڌ��H��ʹ�ð����У��҂������l�F��TLK6002, TLK10002 �c��ģ�K���B�r����ʹ�á�������ȭh�ء�ģʽ�r������һ����ʧ�����ʣ��`�a���^�ߣ����@�r���ГQ��������ͨ·��ģʽ������ϵ�y�������������������`�a���^�ߵĆ��}��
��ƪ�����փԌ����@һ�F���M��ӑՓ���������Q������
1 TLK6002/TLK10002 �h��ģʽ��B
TLK6002/TLK10002 ����I���I�ȵĪ���ͨ��Serdes оƬ�����������`����䣬���V���đ����ڲ�ͬ���I���e�ڹ��w���h�đ��ã��ɞ��˪���ͨ��Serdes �IJ����x��
�����ڹ��w���h�đ����У����F�`�a�r��Ҫ�ֶ����Ų飬����λϵ�y�Юa���`�a��λ�ã����Mһ�����{ԇ�S�o��Q���}��
TLK6002/TLK10002 �ṩ���S���ĭh��ģʽ��
a. ������ȭh�أ��IJ��е����з����·���^��Serdes �Ȳ������ߔ�CML ���_��֮��������·���֣�
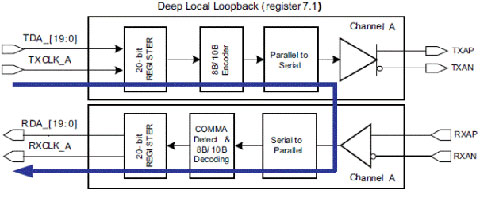
�Dһ ������ȭh��
b. ���˜\�ȭh�أ��IJ��е����з����·�H���^8b/10b �ľ���a�C�����x��оƬ�Ȳ��Ĵ��н���·���֣�
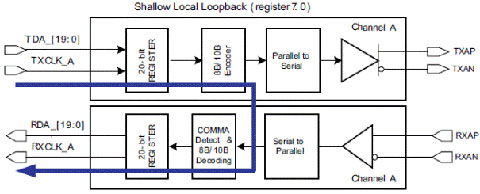
�D�� ���˜\�ȭh��
c. �h����ȭh�أ��Ĵ��е����з����·���^��Serdes �Ȳ������·���֣�
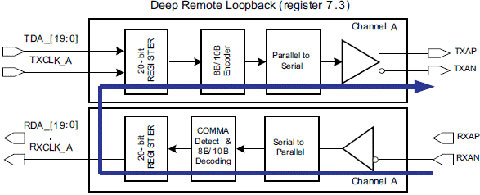
�D�� �h����ȭh��
d. �h�˜\�ȭh�أ��Ĵ��е����з����·���^��Serdes �Ȳ���������FIFO ֮��������·���֣�
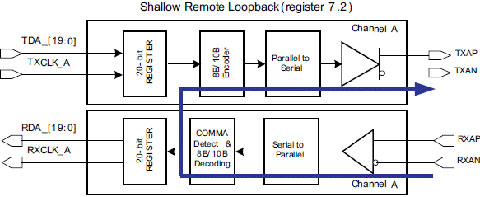
�D�� �h�˜\�ȭh��
2 TLK6002/TLK10002 ������ȭh�����c��ģ�K���B�r�đ��Ì���
�ڹ��w���h�đ����У����ھ��x�^������˶�ʹ�ý����x��SFP+ 6Gbps ~ 10Gbps Ҏ��Ĺ�ģ�K��
a. SFP+��ģ�K�ĽY���c����
����SFP+��һ�N�oCDR �Ĺ�ģ�K������ڽ��շ�������l�·�У��H�H���F��늹�IV ׃�Q��늉������M�о��Ի����Ŵ����еĹ���̖�D���ɞ鴮�����̖������ڔ����Ļ֏͑����У�����ݔ���ۈD�Ї����������˞��˱��C�_���˜ʵ������·��IV ׃���ʺ�늉���������^�ߡ�TLK6002/TLK10002 ݔ��˵�CML
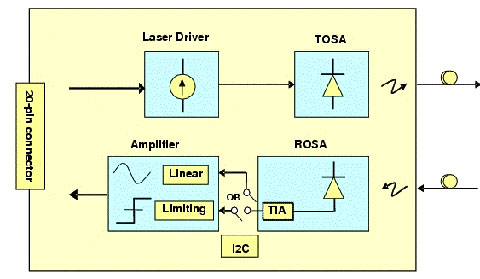
�D�� SFP+��ģ�Kϵ�y�Y��
�����Ј���������SFP+����������ONET8531T��TIA������IV ׃�Q�����ṩ�˸��_4.5K �Ŀ��裻��ONET8501PB ����Ŵ���������С��̖�ṩ�˸��_34dB �����档
���й���̖ݔ�뵽��ģ�K�r�����TIA �����Ŵ����е�AGC �Ԅ���������·�����ã���·���挢���Ԍ��F�[����Ŀ�ĵĉ��s������҂��܉�õ�һ�������Ĵ������̖��
��������̖���P�]������ROSA �е�PIN �ܰ�����Ĵ��ڣ�����TIA ݔ�����������鰵����^�ͣ����ԟoՓTIA �Ŀ����Լ����Ŵ��������������AGC �{�����^��ֵ�������^IV ׃�������Ŵ������D�Q�Ŵ��Ժ��ڹ�ģ�K��ݔ�����҂����܉��^�쵽�����^�ߵğ�����
���ڹ�ģ�K�ȵ������Լ�PCB ���ϴ��ڵĸ��N���_���ȣ�������SerDes ���ն˹��_��һ�����ȵ��S�C��ݔ�롣
b. TLK6002/TLK10002 ������ȭh��ģʽ�Ȳ��Ġ�B
����һ�����x�ρ�����ϵ�y�Ų鹤���������β�׃����Ҫ����˽�����ȭh�ر��OӋ�ɞ����D��ʾ������ӵĆ��_�P���Bͨ���@���ڱ��C���Р�B�C��׃����r�£����Sϵ�y��ݔ���Ĵ�����̖ݔ�뵽����ͨ·��
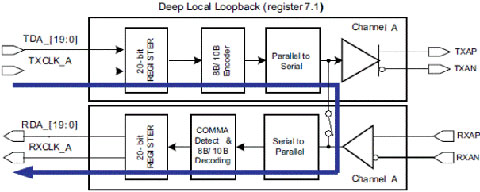
�D�� TLK6002/TLK10002 ������ȭh�Ȳ��B��
�����@����B�£���������·������ʹ�ܣ����TX ����CML ��������ʹ�ܠ�B���܉����ⲿݔ����̖�� RX �����CML ����Ҳ����ʹ�ܠ�B��ݔ����̖���^�������c�h����̖�B�ӣ�ݔ�ͽoSerial to Parallel ���֡�
c. CML ��������ݔ������푑�
CML �ƽ�ڸ�����̖�б��V���IJ��ã����ڸ������H�˜ʻ��M�����]��ᘌ������_����Ę˜ʣ�����ڌ��H�đ����У�оƬ���Č��F���������S��ͬ���������·�����ѽ����죬����γ��������yһ���·�ܘ���
���D��ʾ��CML �ľ��_�����Բ�ַŴ�������ʽ���ɡ����ڸ����lֵ�ĸߵ��ƽ�܉�ʹ�ò���܌�ͨ���ֹ�����õ��ߵ��ƽ��׃�Q��������С���lֵ����̖���f��������MOS �ܿ猧��Rdn �Լ�ؓ�d��裬��Issn �Q���ķŴ��M�зŴ�
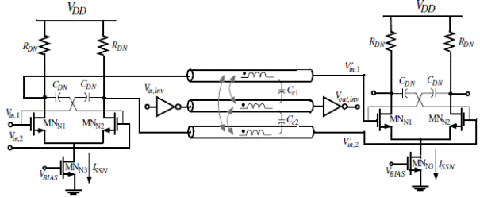
�D�� CML �����ܘ�����Ϸ�ʽ
�����Ҫ�P�]CML ������ݔ�����t��Ҫ�����ݔ��ăɶ˽ӵ��̶����ƽ�ϡ�
d. CDR �`�a�Ľ���
������ķ����҂���֪���ڌ��F������ȭh�ؕr�������ģ�K��Ȼ�cTLK6002/TLK10002 ���B����ģ�K�����ͽoTLK6002/TLK10002���������@����B��RX �����CML ������Ȼ̎��ʹ�ܠ�B������@���������Ŵ���c�h�ط������������̖�B�ӣ����ͽoCDR��
����CDR ����ݔ����̖���ۈD��һ����Ҫ���B����������̖�@Ȼ���ܝM���@һҪ�����CDR ���a�������`�aʹ�íh��ʧ����
3 TLK6002/TLK10002 ������ȭh�صČ��F����
�C��������������Ҫ��ֹRX+/-�ˮa���������B���ڭh����̖��ݔ�ͽoSerdes ��CDR�����ܴ_���h�ص����_�M�С������Փ����Ҫ��CML ��������Idle ��B��
TLK6002/10002 ���Ԕ��_SFP+���B�ӣ�����RX+/-�������ƽ���ܴ_��CML �����M��Idle ��B���Ķ����F��ȭh�ص������M�С�
���P��x:
- ...���D��Ԕ����܇�x���屳���܇Ҏ����ȫ�OӋҪ��
- ...��ʹ���а�ȫ���ϵ��W��惦������ȫ����܇ϵ�y
- ...������ƫ�ò�־��Ԃ��������^���Mչ�͑���
- ...�����¿�˹�y�uijƷ�����ܲ����������C����ƪ
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�(�m)
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�
- ...��RTD�y��ϵ�y�Є�����ʧ���Ӱ�
- ...���{��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^�e



- ...�� ��о�������ø�Уδ����܇�˙C�����OӋ��ِ������ʽ����
- ...�� ̽�صڶ����l�{ɽ�������¡�������ԇ�gՓ����
- ...�� ��2018�Ї��댧�w���B朴�����ڽ��Kʡ�����e��
- ...�� �����}��Ҏ����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�������ܵ�����
- ...�� �ⷨ�댧�w��ST����Cinemo��Valens��CES 2018չ������ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a�I���°lչ�߷�Փ�������ھ����_
- ...�� ����늙C���ݳ���PCIM����2017չ
- ...�� GPGPU���a������Ї�оƬ�a�I�Ŀհ؎�
- ...�� ���W�aƷ�OӋ��Wi-Fi�B�ӵ��Ă��P�I����
- ...�� �������Ї�MEMS���܂������a�I�lչ��������ڰ������_�Ļ
- ...�� IAIC���ِ���[���Ї�о�����Ä��£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �yԇ���g
- ...�� �����Ј��������L�Ƅ�Molex�ӏ���܇�I��İlչ
- ...�� �Ї��Gɫ�����˳���������_�ڼ� ���a�W���ù�̽�Gɫ�lչ��ģʽ
- ...�� Efinix® ȫ����AI߅��Ӌ�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r���aƷ�Uչ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M���������I�ǻ�������
- ...�� ��늮aƷ�_�l���yԇ��ӑ����������Դ�����ɹ��e��
- ...�� Manz���ǿƼ�����댧�w�I�� ����弉�ȳ��ͷ��b�ṩ���W���Ƴ̡�Ϳ�������⑪�õ����a�O���Q����
- ...�� ������ABITRODE����늳yԇϵ�y���������������Դ
- ...�� ������AFTFϵ��늳yԇϵ�y�И˱�������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ�dϵ�y�ɹ����������؈
- ...�� ������A���H��늄���܇���P�I�����y�u��ӑ�������[���M�y�u���g
�aƷ��Ӎ����




��I������
- ...�� �����ɼ��K��ϵ�y�O��
- ...�� ���x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|�J�C����܇ϵ�ЮaƷӋ��
- ...�� ���`˼® �����U������� ⁽�ϵ��™ FPGA �aƷ ⁽�ϵ�ЮaƷ�U�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_�e� (TSMC) 16�{��ˇ���c��Ƭ
- ...�� TI��2019��ȫ����W������OӋ��ِ�C����Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C�@��ȫ���ׂ���܇��ȫ�����Եȼ�(ASIL) ��D���J�C
- ...�� ���R��܇�x��BlackBerry������һ����܇