
ʹ��LabVIEW��CompactRIO�_�l��݆���ʽ�ƄәC����

Quattroped - ��݆���ʽ�Ƅ�ƽ�_
Quattroped ����ƽ�_�Y��
Quattroped����FPGA�����D
"�����ƄәC���˵� �_�l���f�����С�� ���������ܶ��dz���Ҫ����ˈԹ̵�ģ�K �� CompactRIO ϵ�y�dz��m�������_ �l��LabVIEW�� NIӲ��֮�g���x�� �õļ������@���p�����_�l�߈���ϵ�y ���ɵĕr�g�;�����"
- Pei- Chun Lin, Department of Mechanical Engineering, National Taiwan University
The Challenge:
�_�lһ����݆���ʽ �ƄәC���ˣ�ʹ���� ��ƽ̹�ĵ��Ͽ��� ��������Ҳ���� ��Ȼ���˹���ƽ̹�� ���������ͨ�^��
The Solution:
ʹ��NI LabVIEW�� CompactRIO �Լ����NI / O ģ�K���Cе����Ӽ� ܛ���_�l���ټ��ɵ� �����͙C����ԭ �͡�
�Ŀ����
�Ȳ���܇݆�@�ɷN�����ڵ����\��ƽ�_�ϱ��V�����á� ���^���L����׃�^�̣������ꑵ�����Ȳ����`�����������܉����형����ڲ�ƽ̹����Ȼ�����ϱ��Y�� ����һ���棬��l����ƽ���ό��õ��\��܇݆�����ɫ�Ĺ���Ч�ʺ���ƽ���ϸ��ٵ������\�����Ȳ��\�ӟo���ȔM�ġ�
�ɴˣ����ԇ����_����W�ķ����C���ˌ���ң�BioRoLa���F��������OӋһ����݆���ʽ�C���ˣ����Y����܇݆���Ȳ����Ƅ��ԣ���ƽ̹�͐��ӭh���¶��ܞ��҃����������ṩһ���Ƅ�ƽ�_��
�Cе�OӋ
�������τ���ƽ�_�ϲ�ͬ��݆�Ӻ��ȶ��в�ͬ���b�úͼ�����������@Щƽ�_���@������Quattroped����݆���ʽ�ƄәC���˲�����һ�N�D�Q�C�ƣ��Ɍ������ض���һ����׃�γɞ�һ��݆�ӻ�һ�l�ȡ� �ĎνǶȁ��f��һ��݆��ͨ����һ���A��݆Ȧ�������D�S�tλ��݆Ȧ���g�� ݆Ȧ�c������|�������D�S�c�C�������w�ϵ�һ�c���B�����c���ǡ��y�P������ ��һ����r�£�݆ʽ�Ƅӕr݆����ƽ�����\�Ӳ��������D��܇݆�c����Ľ��|�c��λ���y�P���µ�һ�����x̎���������ԣ������Ƅӕr�Ȳ��������Է�ʽ�\�ӣ����y�P���͵�����|�c֮�g�]���ض��Ď����ã�����Ȳ����\���е�����λ�þ����������l��׃�������c��
�����@һ�^��l�F�����y�P���Ƴ��A��݆Ȧ���IJ����B�m�\��ģʽ�Ğ������\��ģʽ�������_��݆ģʽ����ģʽ���D�Q�� �@���l���҂�ȥ�OӋһ�N��ֱ�ӿ��ƈA��݆Ȧ���y�P��������λ�õ�ģʽ���Ķ��������M��݆�\�������M�����\�ӡ� ���ڈA��݆Ȧ��һ�����S�Č����F�@һĿ�˵��^ֱ�ӵķ�����������һ�����ɶȣ�DOF���������\�ӷ����{���y�P�������A��݆Ȧ��λ�á� �ɂ����ɶȵ��\��Ҳ�����γ�ֱ�ǡ� ���⣬�oՓ��݆ģʽ߀����ģʽ������Ч�\��ͬһ�M���ӹ��ʡ�
�C�һ�w��
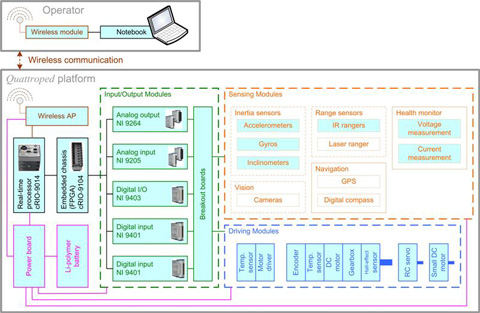
�҂�����NICompactRIOǶ��ʽ����ϵ�y����C���˿�������������һ��400MHz�Č��r̎������3M�F���ɾ����T��У�FPGA���� FPGAֱ���B��NI Cϵ��I/Oģ�K���@Щģ�K���d��������ͼ������@�Ô����� ����ģ�MI/O�҂�����NI 9205��NI 9264I/Oģ�K�����ڔ���I/O����NI 9401��NI 9403I/Oģ�K��FPGA�c���r̎�������B����ͨ�^IEEE 802.11�o����ʽ�c��X�M��ͨӍ��
�C���˂������������R�_���ʷŴ��������ڽ����O�y�ĜضȂ������������Դ������늉�������y����������������݆����У�ʵĻ�����Hall��Ч�����������������w��B�y����6�S�T���ƌ��x��2�S�yб�x�������x���g϶�y����3���t����x��������ȫ��λϵ�y��ҕ�X�ͼ���y���x�ȸ��N������Ҳ��������ߙC���˵ĸБ��������C�����ϵļ���������8�������ӵ�ֱ����ˢ늙C��2������ǰ��܇݆�D�ӵĸ�Ť��RC�ŷ�늙C������݆���ГQ���Ă�С��RC�ŷ�늙C���Ă�С��ֱ����ˢ늙C��
ܛ��
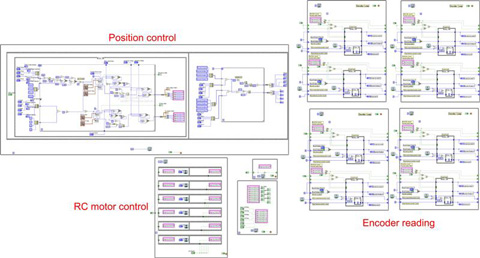
�����\��LabVIEW ��Ӌ����ģ�PC�����rϵ�y��FPGA��ؓ؟��ͬ���΄ա� �Ñ�����PC������ָ���C���ˑ�ԓ��݆ģʽ߀����ģʽ�\�У��l�͵�NI CompactRIO����������������1kHz��ѭ�h�����\�У����P�ڙC���˽�������Ҫ��Ϣ�l�ͻ�������PC��ӛ䛠�B������ �C����ܛ���ܘ��������N��B�C��ÿ����B����һ�N�C�����О顣 ������Ҫ������̖���Q���㷨��10 kHz��ѭ�h����FPGA���\�С� ����ֱ��늄әC�����a���x���Լ�����PWM��RC�ŷ�����ı���-�e��-�֣�PID�����ơ�
�C����ͨ늺��҂��M��늙CУ�ʣ����x�C����ÿ�l��݆�σɂ����S���ɶȵ���ȫ�����á� ͨ�^ƥ�䰲�b�ڙC�������w�ϵĻ���Ч���������Ͱ��b����݆�Ȳ����F������λ�Ì��FУ�ʡ� �҂���������ģʽ��݆ģʽ�²�����У���^�ęC���ˣ��@ȡ�Q�ڮ�ǰRIM���ã�����܇݆���Ȧ��ģʽ���� ���⣬�҂�Ҳ����ͨ�^��݆�D�Q����׃��݆���á� �C����݆ģʽ�µ��О����վ�������������� վ����������ɂ�˲�B��B�������^���^���������ú�����О顣 ������О��У�ǰ�M�ٶȺ��D�����ʶ��B�m���{�� ͬ�ӣ����C��������ģʽ���\���r��վ���������О�Ҳ����˲�r��B�� վ��������ęC���˿��Ԉ��и��N�О飬�������С�С�ܡ��粽����Խ�ϵK�������ݡ�
NIܛӲ������̎
��һ����r�£��C���ˌ��ڸ����ɶȵď��sϵ�y�� �C���˵ijɹ��lչ��Ҫ���M�r�g�;������������ϸ��N�Cе��늚��Ӌ��Cϵ�y�� ���ԇ����_����WBioRoLa�Fꠣ���Ҫ�ɓ��ЙCе���̱����ČW���M�ɣ�������Ҫһ���ɿ���ģ�K��������ʹ�ü����ü��ɵ�ƽ�_��
���^�V�����о����҂��l�FNI�aƷ�ܞ��҂��đ��ó����ṩ�^�ѽ�Q������ԭ�����£� LabVIEW��Ǿ��̱����ČW���ṩ��ֱ�^�ĈD�λ����̈D��ʾ���������������p�ɽ����^�̈D�������Q������Ȼ���ٌ��^�̈D�D����ܛ���� ����Windows��RTOS�ͻ���FPGA��Ŀ����ʹ����ͬ�ĈD�λ��_�l�h��Ҳ�O���Ў����� �����_�l������ܛ���r�҂����ػ��r�g�W���ӵľ����Z��������܉���ĕr�g��ע���҂��OӋ�ęCе���֡�
�������ƄәC���˵��_�l���f�����С�����������ܶ��dz���Ҫ����ˈԹ̵�ģ�K��CompactRIOϵ�y�dz��m�������_�l�� LabVIEW��NIӲ��֮�g���x���õļ������@���p�����_�l�߈���ϵ�y���ɵĕr�g�;�������
δ��Ӌ��
�{��NI LabVIEW�D�λ�ϵ�y�OӋ��NI CompactRIO��һ֧�Cе���̌W���F��OӋ����һ�����Ѓ���ܛ������ď��s�C�һ�w��ϵ�y�����ڽ����Mһ���_�l�UչҲ�ܷ��㡣 ��Ӳ�����棬�҂����ڌ����N�������ںϵ���ǰ�ęC늻�ϵ�y�У�����ߙC���˵ĸБ������� �ڄ������棬�҂��������ƺ��_�l�����]�h���ƹ��ܵ��Ȳ��О飬����ߙC�����ڸ��N���������Եĵ����ϵ��Ƅ����������_�l���Ȳ��ӑB���B��
���P��x:
- ...2012/09/04 13:42��ʹ��LabVIEW��PXI�M�Ж|�����Y�������O�y
- ...2012/08/21 10:24��ʹ��LabVIEW��ԭ�ͻ�����Cҕ����ʿ�o��LED���R
- ...2012/08/13 14:58��ʹ��LabVIEW��PXI��CompactRIO�����_�l̫��̽���w�����Y���yԇϵ�y
- ...2012/08/13 14:37��ʹ��LabVIEW���FKTX������܇����Դ�Ŀ�ҕ��
- ...2012/08/13 13:24�����ܿ����a�h����ʹ��LabVIEW��NI TestStand��PXI�yԇ�t��Ѫ�ǃx���ȍu��ݔ��ϵ�y
- ...2012/08/13 13:22��ʹ��LabVIEW��FPGA�턓��һ���Ԅӻ����������yԇϵ�y
- ...���D��Ԕ����܇�x���屳���܇Ҏ����ȫ�OӋҪ��
- ...��ʹ���а�ȫ���ϵ��W��惦������ȫ����܇ϵ�y
- ...������ƫ�ò�־��Ԃ��������^���Mչ�͑���
- ...�����¿�˹�y�uijƷ�����ܲ����������C����ƪ
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�(�m)
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�
- ...��RTD�y��ϵ�y�Є�����ʧ���Ӱ�
- ...���{��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^�e



- ...�� ��о�������ø�Уδ����܇�˙C�����OӋ��ِ������ʽ����
- ...�� ̽�صڶ����l�{ɽ�������¡�������ԇ�gՓ����
- ...�� ��2018�Ї��댧�w���B朴�����ڽ��Kʡ�����e��
- ...�� �����}��Ҏ����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�������ܵ�����
- ...�� �ⷨ�댧�w��ST����Cinemo��Valens��CES 2018չ������ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a�I���°lչ�߷�Փ�������ھ����_
- ...�� ����늙C���ݳ���PCIM����2017չ
- ...�� GPGPU���a������Ї�оƬ�a�I�Ŀհ؎�
- ...�� ���W�aƷ�OӋ��Wi-Fi�B�ӵ��Ă��P�I����
- ...�� �������Ї�MEMS���܂������a�I�lչ��������ڰ������_�Ļ
- ...�� IAIC���ِ���[���Ї�о�����Ä��£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �yԇ���g
- ...�� �����Ј��������L�Ƅ�Molex�ӏ���܇�I��İlչ
- ...�� �Ї��Gɫ�����˳���������_�ڼ� ���a�W���ù�̽�Gɫ�lչ��ģʽ
- ...�� Efinix® ȫ����AI߅��Ӌ�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r���aƷ�Uչ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M���������I�ǻ�������
- ...�� ��늮aƷ�_�l���yԇ��ӑ����������Դ�����ɹ��e��
- ...�� Manz���ǿƼ�����댧�w�I�� ����弉�ȳ��ͷ��b�ṩ���W���Ƴ̡�Ϳ�������⑪�õ����a�O���Q����
- ...�� ������ABITRODE����늳yԇϵ�y���������������Դ
- ...�� ������AFTFϵ��늳yԇϵ�y�И˱�������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ�dϵ�y�ɹ����������؈
- ...�� ������A���H��늄���܇���P�I�����y�u��ӑ�������[���M�y�u���g




- ...�� �����ɼ��K��ϵ�y�O��
- ...�� ���x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|�J�C����܇ϵ�ЮaƷӋ��
- ...�� ���`˼® �����U������� ⁽�ϵ��™ FPGA �aƷ ⁽�ϵ�ЮaƷ�U�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_�e� (TSMC) 16�{��ˇ���c��Ƭ
- ...�� TI��2019��ȫ����W������OӋ��ِ�C����Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C�@��ȫ���ׂ���܇��ȫ�����Եȼ�(ASIL) ��D���J�C
- ...�� ���R��܇�x��BlackBerry������һ����܇