
�Һ�ŷ��C���cCAN�����ӿ��OӋ
����1ǰ��
���������͌����ƌ��Ϳ���ϵ�y�в��ÿ���ʽ�Ĕ�����ݔ�������ǽ�Q�F�еČ����w�п���ϵ�y�У�ͨ�^�c���cֱ���B�ӵ���|�W��ݔģ�M��̖��ɵĽY�����s���ɿ��Ե͡�ϵ�y��늴ż������c�������������T��ײ���һ���^�õ�;�����Һ�ŷ��C���nj�������ϵ�y����Ҫ�ĽM�ɲ��֡�����������������Ӱ푵������Ŀ��ƾ��ȣ������Q���w�еijɔ����ڿ���ʽ��������ϵ�y�У������Һ�ŷ��C�������鿂���ϵ�һ�����c����ڿ����ϣ���˱���OӋһ���������c�Һ�ŷ��C���B�������Ľӿڡ���������ʽ����ϵ�y�Y����D1��ʾ��
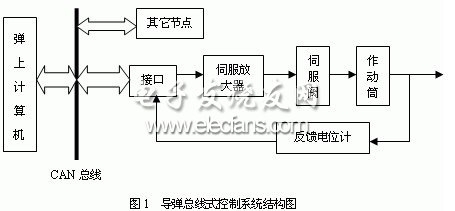
�����ڌ����w���У��T������Ԫ���@�Ì������w�Ѕ������͵�����Ӌ��C�����^Ӌ��C�\����γɿ���ָ�ָ��͵��������Һ�ŷ��C����ͨ�^�����Һ�ŷ��C��������Ͳ�Ą��������ƌ������w�Џ�����
����1.1��CAN����
����CAN(Controller Area Network)������������W�j��CAN������һ�N����վ�ֲ��W�j���܉���Ч֧�ֲַ�ʽ����ϵ�y�r����ϵ�y��ͨ�Ź���;�������p������ͨ�ŷ�ʽ������̎������ͨ�^CAN�������쵽CAN�����ϣ��������^���ęz�e�����Լ����ș���ٲù��ܣ����ڸ����h����ʹ�ã����ݔ���ʿɸ��_1Mb/s��
����1.2��PC/104
����PC/104�ǹ��IǶ��ʽPC�ęCе늚�˜ʡ������ƶ�����Ƕ��ʽ�����ṩ�˘˜ʵ�ϵ�yƽ�_��PC/104�����cPC/AT����(ISA)��ȫ���ݡ�������IEEE-P996�˜ʣ�������̖�ƽ�cTTL���ݡ�PC/104ģ�Kһ���ṩ6mA�Ŀ���������������15�����ĵ�TTLؓ�d���c��ͨ�Ĺ��I���ƙC��ȣ�PC/104���������������c��
������PC/104ģ�K�cPC�Cܛ��Ӳ����ȫ���ݣ��������ìF�е��^�S���ͳ����Ӳ����ܛ���_�l�����������OӋ֪�R���YԴ���_�l���ڶ̣��ɱ��͡�
������PC/104ģ�K�w�eС�����ĵͣ��o��ɢ�ᣬ�ɌӯB������ϵ�y�������ܣ�оƬ���Ĵ�С��
������ģ�K֮�g���ê��صĿv��ӯB�����Ӳ�ĽY�Ϸ�ʽ��ģ�K�ӯB���Ľ�߀��֧������ᔹ̶����ɿ��Ըߣ������`��㣬���ڹ��ϵ��ų���������
���������ģ�K�Rȫ���Ñ������x����N��ͬ�Ĺ���ģ�K���OӋ�M�㲻ͬ��Ҫ�Č���ϵ�y��
�����ݹ����ضȷ�������һ����0-70�ȡ�
���������ģ�K���Æ�+5V�Դ��������ϵ�y���Դ��Ҫ��
����2���ӿ�Ӳ���OӋ
�����������Hϵ�y��Ҫ���ӿڵĹ�����Ҫ�ǣ����F�c����Ӌ��C��ͨ�ţ��ڿ���ϵ�y������һ���K�˽��Տ���Ӌ��C������ָ��͔������M�п����㷨���\�㼰����D/A��A/D�D�Q�������ŷ��C�����\����Ϣ�͠�B������ݔ�o����Ӌ��C��
�����ӿ��cCAN����֮�g�Ă�ݔ���|���������p�g�����ӿ�Ӳ�����û���PC/104�����˜ʵ�ģ�K����Ҫ�У�D/A��A/Dģ�K��̎����ģ�K���ⲿ�惦ģ�K���p���Ӽ��r�����ģ�K��CAN����ͨ��ģ�K����D2��ʾ��

����1)D/Aģ�K
�����ڱ��OӋ�У��҂��x������AD��˾��AD7547��ģ�D�Q��������һ�N�p12λ���ݔ����DACS(�����ռ��c����ϵ�y)�������������c���^���Ĺ���늉�(12-15V);���Դ늉��ɔ_���ܺ�;�o���ķ��b��ʽ(24�_0.3Ӣ��DIP���b);�������`������Ժʹ������̎�������ʹ�ã��܉����TTL��CMOS�ƽ��ͨ�^�����ą���늉��ͷ�����裬߀�܉��ṩ�����ij˷������ܡ���Ȳ���Ҫ�����������֣�����߉�·��A·��ģ�D�Q�·��B·��ģ�D�Q�·������߉�����·ͨ�^���ε�����������̖��CSA��CSB��WR���x��������ģ���D�Q����ͬ�r�i����Ҫ�D�Q�Ĕ�����A·��ģ�D�Q�·�Ļ�������ԭ��飺ͨ�^CSA�cWR������̖����12λ���D�Q����һ���i����A·�D�Q�·�Ĕ����Ĵ����У�A·�D�Q�·�_ʼ�M�Д�ģ�D�Q�����D�Q���ģ�M��ݔ����B·�D�Q�·�Ŀ���ԭ���cA·��ơ�
����2)A/Dģ�K
����A/Dģ�K�������Һ�ŷ��C��λ�ƙz�y�b��ݔ���ķ�����̖�D���锵�����Ա���Ӌ��C�M��̎����ϵ�y�Ŀ��ƾ����ںܴ�̶���ȡ�Q�ڙz�y�����b�õľ��ȡ������ŷ��C���ķ���������ϵ�y����ָ��Ҫ���OӋ�в�������AD��˾���a��AD674Aģ���D�QоƬ������һ��12λ��αƽ��Ϳ���A/D�D�Q�����D�Q�ٶ��^���15�롣AD674AƬ���������Bݔ�����_���·���������ֱ���c���N���͵�8λ��16λ̎�������B�����o횸���߉�ӿ��·�������cCMOS��TTL�ƽ���ݡ�
����3)̎����ģ�K
�������OӋ��̎��������PC/104Ƕ��ʽӋ��C����������кܿ���\���ٶȣ���������Ҫ��ӿ��ṩ���ٵĔ����\���c̎�����ܣ��@Щ������������Ӌ��Cͨ�^�����́��Ŀ��Ɣ�����ͨ�^ģ���D�Qģ�K�ɼ���λ�ƙz�y�b�õ�ݔ������̎�����������M��̎���;C�ϣ��γ�ݔ��������������Ͳ�Ą�����
����4)�p���Ӽ��r�����ģ�K
����CAN������SJA1000�ĵ�ַ�����͔��������ǰ���INTEL��8λ��Ƭ�C����Ҏ���OӋ�ģ��cPC/104��������ֱ�����B�����gҪ���^�p�����·�͕r���D�Q�·�M�ЃɷN������̖���ГQ������PC/104�����Ĕ���������I/O��ַ�������^���������͕r���D�Q׃��SJA1000�Ĕ���/��ַ���ÿ������@��߅��һ���P�I�ĕr���ГQ���}�����ƿ�������̖ҲҪ���^�������D�Q�����ӿ���������SJA1000���D�Q�·ԭ����D��D3��ʾ��
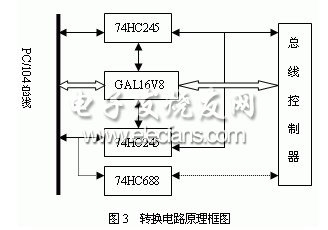
�����D3�м�������ʾ�������͵�ַ����������ʾ���ƾ�����̓����ʾƬ�x��̖��
�����ڱ��OӋ�У����������͵�ַ�����քeͨ�^�ɂ��˿����հl����74HC245�B�ӵ�CAN������SJA1000�Ĕ�������ַ���ÿ����ϡ�74HC245��8λ�Ŀ����հl�������������Bݔ���������M���p��Ĕ������͡��@���g�ÿɾ���߉оƬGAL16V8�OӋ��һ���r�����߉�·�����ƃ�Ƭ74HC245�Ĺ������M�Еr���ГQ�������┵���͵�ַ�a�����ܵě_ͻ��Ƭ�x��̖����һƬ74H688�a���ģ�74H688��һ��8λ�Ĕ�ֵ���^��/��ֵ�z�y����ͨ�^�����_�P���O��I/O��ַ����74HC688�����^PC/104�����ϵĵ�ַ��Ϣ���O����I/O��ַ�Ƿ���ͬ������ͬ�t��SJA1000�a��Ƭ�x��̖�����ƿ�������̖�ГQҲ���ɿɾ���߉оƬGAL16V8�팍�F�ġ�
����5)ͨ��ģ�K
����CAN����ͨ��ģ�K��CAN������SJA1000����늸��x��6N137��CAN�հl��82C250�M�ɣ���D4��ʾ��
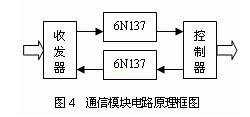
����a)SJA1000��PHILIP��˾���a�Ę˜�CAN����������������ܛӲ���OӋ����ȫ���ݻ���CAN����������PCA82C200�����к�����ȫ���ݵ����_�ͅf�hCAN2.0A�����߿�����Q�����⣬��߀֧�ֿ����Uչ�f�h��CAN2.0B�����ЃɷN����ģʽ������ģʽ�͔Uչģʽ���ڻ���ģʽ�£�����32�������Ĵ��������ڔUչģʽ�£�����127�������Ĵ��������OӋ�x�û�������ģʽ����֧��CAN2.0A�f�h��CAN������һ��������c�������ӿڵĹ��ܣ���һ����߀�����CANͨ�Ņf�h��Ҫ���ȫ�����ܡ�
����b)82C250��CAN�����հl�������ǿ����������������g�Ľӿڡ�CAN�������Ă��ͺͽ��ն˲����S�c����ֱ�����B��ԭ���ǣ����W�j��ij�����cδ��늻�l�����ϕr����Ӱ������W�j���������������⣬���������F��·���ϕr��CAN��������ݔ�������п��ܓp�ġ����ԣ��ڌ��F�����б����CAN�������c����֮�g�O��һ���ӿ��·��82C250���ṩ�������IJ�Ӱl�������͌�CAN�������IJ�ӽ���������82C250߀���к�����������������ͨ�ž��x(�^�h���_10Km)�������M��б�ʿ����Խ������l�ɔ_������˲�g���ɔ_�������������N����ģʽ������ģʽ��б�ʿ���ģʽ�ʹ��Cģʽ�����OӋ�в�����б�ʿ���ģʽ��ͨ�^��8���_�Ͻ�һ��18�Wķ���������ƿ����ϵ�б�ʡ�
����c)6N137��һ��TI��˾���a�ĸ��ٹ�늸��x�����������^�ߵ��ٶȣ����ԝM��ϵ�y��Ҫ���ù�늸��x�·�Ժ��������c�����������քe��늣������˶��ߵ�늚��B�ӣ��Mһ������˿��ɔ_���ܡ�
����3���ӿ�ܛ���OӋ
�����ŷ��C���cCAN�����ӿ�ܛ������Ҫ�΄��У���ʼ�������տ�����Ϣ�����l����Ϣ�������Дࡢ�����\���cݔ��ݔ�����ơ��ŷ��C���������ɼ�����̖����ָ���l���ӵ�ַ�Ĕ������_�^�ȣ��ď���Ӌ��C���յ�ָ��͔����t����ָ���Ľ����ӵ�ַ�Ĕ������_�^�ȡ����ӿ��յ�����Ӌ��C�Ŀ���ָ����_ʼ���ŷ��C���M�п��ơ�
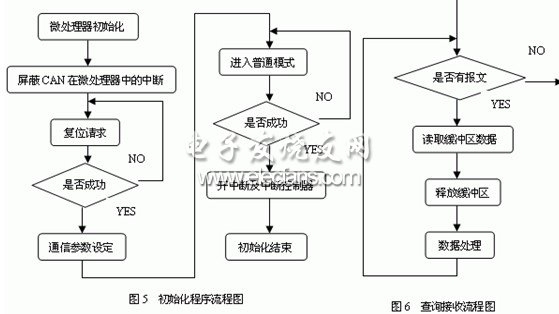
������ʼ�������OӋ�DZ��ӿ��OӋ����Ҫ��һ���h������ϵ�y��늏�λ�����ȴ_��̎�������O�ã�Ȼ����SJA��λ����Ҫ�_���cͨ�����P�ą����������������r�����N�Ĵ�������ģʽ�ȡ���ϵ�y�\���^���У�Ҳ���l��һ����λՈ�������F��r���´_��ϵ�y��ͨ�Ņ��������ʼ��������Ҫ���E�У�
����1)��ʼ��̎������ͬ�r�P�]�cCAN���������B���ⲿ�Дࡣ
����2)�z���λ�ˣ����M�Џ�λ��B���t�O��ͨ�Ņ���������������ģʽ���r��ӼĴ��������մa�Ĵ�����ݔ�����ƼĴ������������μĴ����Ϳ������r�ȡ�
����3)�z���λՈ��λ�����λՈ��λ��ͣ��tϵ�y�M������������B���_̎�������ⲿ�Д��Լ�CAN�������������Дࡣ
������ʼ���������̈D��D5��ʾ��
���P��x:
- ...���D��Ԕ����܇�x���屳���܇Ҏ����ȫ�OӋҪ��
- ...��ʹ���а�ȫ���ϵ��W��惦������ȫ����܇ϵ�y
- ...������ƫ�ò�־��Ԃ��������^���Mչ�͑���
- ...�����¿�˹�y�uijƷ�����ܲ����������C����ƪ
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�(�m)
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�
- ...��RTD�y��ϵ�y�Є�����ʧ���Ӱ�
- ...���{��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^�e



- ...�� ��о�������ø�Уδ����܇�˙C�����OӋ��ِ������ʽ����
- ...�� ̽�صڶ����l�{ɽ�������¡�������ԇ�gՓ����
- ...�� ��2018�Ї��댧�w���B朴�����ڽ��Kʡ�����e��
- ...�� �����}��Ҏ����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�������ܵ�����
- ...�� �ⷨ�댧�w��ST����Cinemo��Valens��CES 2018չ������ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a�I���°lչ�߷�Փ�������ھ����_
- ...�� ����늙C���ݳ���PCIM����2017չ
- ...�� GPGPU���a������Ї�оƬ�a�I�Ŀհ؎�
- ...�� ���W�aƷ�OӋ��Wi-Fi�B�ӵ��Ă��P�I����
- ...�� �������Ї�MEMS���܂������a�I�lչ��������ڰ������_�Ļ
- ...�� IAIC���ِ���[���Ї�о�����Ä��£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �yԇ���g
- ...�� �����Ј��������L�Ƅ�Molex�ӏ���܇�I��İlչ
- ...�� �Ї��Gɫ�����˳���������_�ڼ� ���a�W���ù�̽�Gɫ�lչ��ģʽ
- ...�� Efinix® ȫ����AI߅��Ӌ�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r���aƷ�Uչ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M���������I�ǻ�������
- ...�� ��늮aƷ�_�l���yԇ��ӑ����������Դ�����ɹ��e��
- ...�� Manz���ǿƼ�����댧�w�I�� ����弉�ȳ��ͷ��b�ṩ���W���Ƴ̡�Ϳ�������⑪�õ����a�O���Q����
- ...�� ������ABITRODE����늳yԇϵ�y���������������Դ
- ...�� ������AFTFϵ��늳yԇϵ�y�И˱�������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ�dϵ�y�ɹ����������؈
- ...�� ������A���H��늄���܇���P�I�����y�u��ӑ�������[���M�y�u���g




- ...�� �����ɼ��K��ϵ�y�O��
- ...�� ���x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|�J�C����܇ϵ�ЮaƷӋ��
- ...�� ���`˼® �����U������� ⁽�ϵ��™ FPGA �aƷ ⁽�ϵ�ЮaƷ�U�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_�e� (TSMC) 16�{��ˇ���c��Ƭ
- ...�� TI��2019��ȫ����W������OӋ��ِ�C����Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C�@��ȫ���ׂ���܇��ȫ�����Եȼ�(ASIL) ��D���J�C
- ...�� ���R��܇�x��BlackBerry������һ����܇