
51��Ƭ�C���C�Ԅӽ��Qϵ�y�з����\�е��OӋ����
������������d��ͨ���У��C�ԄӱP�Ĺ��ܶ࣬߉�ԏ���MCS—51��Ƭ�C��ԓϵ�y��̎���΄Օr�Č��r���Ȟ�ͻ��������ԓϵ�y���C���õ���Ҫ���Ռ���������{�ȣ�������ʹ�íh����������o��ֵ��վ������ϵ�y�����Ƿ�ֱ��Ӱ푵�������d���C�����C���ܡ�ᘌ����ͨ�����c���ڿ��]�����\�з����҂���ȡ������헴�ʩ��
����1���O������ӕr��λ�·
����1��1����ʲôҪ�M����늏�λ
����Ӌ��C�چ����\�Еr��Ҫ�M�Џ�λ�������ڿ����I���Б����^�V���Ć�Ƭ�C����λ̎�������OӋ�е��P�I����Ƭ�C�Ȳ��ĸ������ܲ�����������ܼĴ������ƣ������\��ֱ���ܳ���Ӌ����ָ�]���Ĵ����ď�λ��B�Q���ˆ�Ƭ�C�����P���ܲ��������õij�ʼ��B��������������\�о��Ǐ��@����B�_ʼ�ġ������늕r�]���������_��λ���Ϳ���ʹCPU�IJ�����ַ�_ʼ����ָ�ϵ�y�͵ò������_�ij�ʼ����Ҳ�Ͳ�������������
����1��2����λ�l��
������Ƭ�C�ǿ��ⲿ�·��λ�ġ���늏�λ���E��
������1��������Ƚ����ԴVcc��
������2��Vcc�������_�����Sֵ���r���ʎ������
������3����λ�_�������ʎ����������ٱ��փɂ��C�����ڏ�λ�ƽ��Ҳ�����f����λ�_��RST����λ�ƽ�S�֕r�g������Vcc�Ľ����r�g����ʎ������r�g�����كɂ��C�����ڕr�g��
����1��3��һ����늏�λ�·
��������늕r���ԴVcc�Ľ����r�g��С�ڎ�ʮms����ʎ��������r�gȡ�Q����ʎ���l�ʣ�����10MHz���w������r�g��1ms������1MHz���w������r�gһ���10ms���˕r�ɲ���һ����늏�λ�·���D1����
����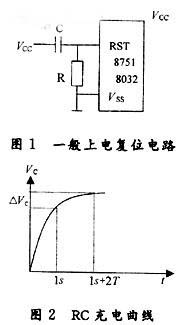
����������ԴVcc�����\���ٶ��ஔ������ϵ�y��RC��늏�λ�·�����ܱ��Cϵ�y�ɿ���λ�����磬�����r�g��1s���tRC���������D2��ʾ���˕r���yʹRC�·ݔ�������ď�λ�ƽ���S��RC�ij�늣�RST�_���λΔVcԽ��Խ�ͣ����Դ������ΔVc�ķ��Ȳ��M��ɂ��C���ȏ�λ�ƽ��Ҫ��RST�_�Ϳ����˳���λ��B�������ң�RST�_�������Դ�ɔ_���a���`��λ��
����1��4������ӕr��λ�·
�����mȻ������d���C�Դ�F�������_�P������ʽ�������ٶȱ������Ĵ�ʽ��ʽ�{���Դ�죬�����ڙC������ʹ�õ�늉��ȼ��࣬����Ҫ����_�C����N�Դ�Ľ�������߀��Ҫ500ms�r�g���ܷ�������5V�ԴҲ�����⣩���������Ԅӽ��Qϵ�y�в���һ����늏�λ�ڕr�g�ώ������ܝM���λҪ���@����� MCS—51����һ����늏�λ�·��Ҫ���Դ������20ms�Ƚ������ܱ��C��λ���@����Ӳ�����ԣ����ڿ˷��@һ�r�������y���f���҂�����������ʹ��������Դ��Ѹ�ٽ�����ԓ�aƷҪ�����c֮�����O���Դ����ֻ��ᘌ�MCS—51����������ϵ�y�OӋ�ϲ�ȡ������ʩ��
����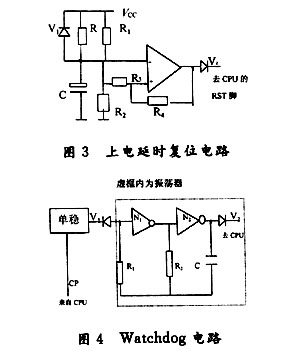
����MCS—51Ӳ����λҪ���C��Vcc��������ʎ������������Ѓɂ��C�����ڣ�24����ʎ�����ڣ��ĸ��ƽ���F��RST�ˣ������ЃȲ���λ������҂��OӋ��һ������ӕr�·��ԓ�·��ᘌ���ͬ�Դ�����r�g���L�̣���׃R��C���������{���ӕr�r�g�����ڲ�����ԓ�·���ڟo��ֵ��վ��ϵ�y������ͣ늡�����늶����F“���C”���ͨ���Д�F����D3��ʾ��R1��R2�ṩ���^�λ��2��3Vcc����RC��늕r�g��R��C�����Q����R4���ԭ��̖߅��У����V1�����ܞ��l����늕r���C��й���·��V2�cWatchdog�·��߉�ϳɻ��Pϵ���_�C�rͬ����λ���ڷ�����λ��ݔ�����������λ�����Դ�������g����RC��늕r�g������t���Դ��������RC���늉�����2��3Vcc�r��ԓ�·ݔ��“0”��������늏�λ������ɡ�
������������d��ͨ���У��C�ԄӱP�Ĺ��ܶ࣬߉�ԏ���MCS—51��Ƭ�C��ԓϵ�y��̎���΄Օr�Č��r���Ȟ�ͻ��������ԓϵ�y���C���õ���Ҫ���Ռ���������{�ȣ�������ʹ�íh����������o��ֵ��վ������ϵ�y�����Ƿ�ֱ��Ӱ푵�������d���C�����C���ܡ�ᘌ����ͨ�����c���ڿ��]�����\�з����҂���ȡ������헴�ʩ��
����1���O������ӕr��λ�·
����1��1����ʲôҪ�M����늏�λ
����Ӌ��C�چ����\�Еr��Ҫ�M�Џ�λ�������ڿ����I���Б����^�V���Ć�Ƭ�C����λ̎�������OӋ�е��P�I����Ƭ�C�Ȳ��ĸ������ܲ�����������ܼĴ������ƣ������\��ֱ���ܳ���Ӌ����ָ�]���Ĵ����ď�λ��B�Q���ˆ�Ƭ�C�����P���ܲ��������õij�ʼ��B��������������\�о��Ǐ��@����B�_ʼ�ġ������늕r�]���������_��λ���Ϳ���ʹCPU�IJ�����ַ�_ʼ����ָ�ϵ�y�͵ò������_�ij�ʼ����Ҳ�Ͳ�������������
����1��2����λ�l��
������Ƭ�C�ǿ��ⲿ�·��λ�ġ���늏�λ���E��
������1��������Ƚ����ԴVcc��
������2��Vcc�������_�����Sֵ���r���ʎ������
������3����λ�_�������ʎ����������ٱ��փɂ��C�����ڏ�λ�ƽ��Ҳ�����f����λ�_��RST����λ�ƽ�S�֕r�g������Vcc�Ľ����r�g����ʎ������r�g�����كɂ��C�����ڕr�g��
����1��3��һ����늏�λ�·
��������늕r���ԴVcc�Ľ����r�g��С�ڎ�ʮms����ʎ��������r�gȡ�Q����ʎ���l�ʣ�����10MHz���w������r�g��1ms������1MHz���w������r�gһ���10ms���˕r�ɲ���һ����늏�λ�·���D1����
����
����������ԴVcc�����\���ٶ��ஔ������ϵ�y��RC��늏�λ�·�����ܱ��Cϵ�y�ɿ���λ�����磬�����r�g��1s���tRC���������D2��ʾ���˕r���yʹRC�·ݔ�������ď�λ�ƽ���S��RC�ij�늣�RST�_���λΔVcԽ��Խ�ͣ����Դ������ΔVc�ķ��Ȳ��M��ɂ��C���ȏ�λ�ƽ��Ҫ��RST�_�Ϳ����˳���λ��B�������ң�RST�_�������Դ�ɔ_���a���`��λ��
����1��4������ӕr��λ�·
�����mȻ������d���C�Դ�F�������_�P������ʽ�������ٶȱ������Ĵ�ʽ��ʽ�{���Դ�죬�����ڙC������ʹ�õ�늉��ȼ��࣬����Ҫ����_�C����N�Դ�Ľ�������߀��Ҫ500ms�r�g���ܷ�������5V�ԴҲ�����⣩���������Ԅӽ��Qϵ�y�в���һ����늏�λ�ڕr�g�ώ������ܝM���λҪ���@����� MCS—51����һ����늏�λ�·��Ҫ���Դ������20ms�Ƚ������ܱ��C��λ���@����Ӳ�����ԣ����ڿ˷��@һ�r�������y���f���҂�����������ʹ��������Դ��Ѹ�ٽ�����ԓ�aƷҪ�����c֮�����O���Դ����ֻ��ᘌ�MCS—51����������ϵ�y�OӋ�ϲ�ȡ������ʩ��
����
����MCS—51Ӳ����λҪ���C��Vcc��������ʎ������������Ѓɂ��C�����ڣ�24����ʎ�����ڣ��ĸ��ƽ���F��RST�ˣ������ЃȲ���λ������҂��OӋ��һ������ӕr�·��ԓ�·��ᘌ���ͬ�Դ�����r�g���L�̣���׃R��C���������{���ӕr�r�g�����ڲ�����ԓ�·���ڟo��ֵ��վ��ϵ�y������ͣ늡�����늶����F“���C”���ͨ���Д�F����D3��ʾ��R1��R2�ṩ���^�λ��2��3Vcc����RC��늕r�g��R��C�����Q����R4���ԭ��̖߅��У����V1�����ܞ��l����늕r���C��й���·��V2�cWatchdog�·��߉�ϳɻ��Pϵ���_�C�rͬ����λ���ڷ�����λ��ݔ�����������λ�����Դ�������g����RC��늕r�g������t���Դ��������RC���늉�����2��3Vcc�r��ԓ�·ݔ��“0”��������늏�λ������ɡ�
����2�����ÿ��T���·���Fϵ�y���o
����2��1����λ�����OӋҪ��
�������MCS—51�Ȳ��oWatchdog���ܣ�8096ϵ�І�Ƭ�C�У������������ⲿ�Uչ���·����D4��ʾ���η��·������|�l�·��ֻҪ�|�l�}�_��CP����������������ݔ�����η�һֱ̎��˲�B�A�Σ�ݔ�����ƽ��ͨ�^V1Ƕλ����ʎ�·ͣ����ʎ��ݔ��“0”��Ӱ�RST�_��CPU̎������������B�������ij�Nԭ��CP�oݔ�����η�̎�ڷ��B��ݔ��“1”��ʎ������ݔ������������RST�_�����˱��C��λ�����������h���ڃəC�����ڣ������ّ�����CP�ɂ����ڣ��Ա��C�����Еr�g��Watchdog
����̎����ݔ���������|�l�}�_��ʹ��ʎ��ͣ��ݔ��“0”��Ӱ�RST�_����
����2��2���������|�l�}�_ܛ���OӋ���]
������ܛ���a���������|�l��̖������ԓ�·�������Դ_��ϵ�y�����\�С��ڮa��ԓ��������̖�r��ע�������c��
������1����̖����ȡ���r���Дʽ�@�á��@�������¿��]���ڳ�ʼ�����r�Д༴�_ʼ��������������ij�N��̖�ɔ_ʹ�������D�w������δ�ƉĶ��r�����P�Д�����O�ã����r�Д��п��������������t�������}�_����ݔ���������˕rWatchdog�t����ʹ������֏�������
������2��Watchdogݔ��ģ�K�����������У��������Ўׂ�ѭ�h�w�͑�����ׂ�Watchdogݔ��ģ�K���Դ_���������Ɖġ�
������3���������ְ�����������Д����Watchdog���HҪ���o�������D�w������ҲҪ���o�Д�����D�w�����o������D5��ʾ���O���Д��\�И�־��1���μ�
���P��x:
- ...2011/11/11 10:37������AT89C51��Ƭ�C�ĜضȜy��ϵ�y�OӋ
- ...2011/09/19 14:49������MCS51��Ƭ�C�Ĺ��I����ɢ���OӋ
- ...2008/08/15 14:33��51��Ƭ�C�Ĵ��пڔUչ����
- ...���D��Ԕ����܇�x���屳���܇Ҏ����ȫ�OӋҪ��
- ...��ʹ���а�ȫ���ϵ��W��惦������ȫ����܇ϵ�y
- ...������ƫ�ò�־��Ԃ��������^���Mչ�͑���
- ...�����¿�˹�y�uijƷ�����ܲ����������C����ƪ
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�(�m)
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�
- ...��RTD�y��ϵ�y�Є�����ʧ���Ӱ�
- ...���{��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^�e



- ...�� ��о�������ø�Уδ����܇�˙C�����OӋ��ِ������ʽ����
- ...�� ̽�صڶ����l�{ɽ�������¡�������ԇ�gՓ����
- ...�� ��2018�Ї��댧�w���B朴�����ڽ��Kʡ�����e��
- ...�� �����}��Ҏ����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�������ܵ�����
- ...�� �ⷨ�댧�w��ST����Cinemo��Valens��CES 2018չ������ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a�I���°lչ�߷�Փ�������ھ����_
- ...�� ����늙C���ݳ���PCIM����2017չ
- ...�� GPGPU���a������Ї�оƬ�a�I�Ŀհ؎�
- ...�� ���W�aƷ�OӋ��Wi-Fi�B�ӵ��Ă��P�I����
- ...�� �������Ї�MEMS���܂������a�I�lչ��������ڰ������_�Ļ
- ...�� IAIC���ِ���[���Ї�о�����Ä��£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �yԇ���g
- ...�� �����Ј��������L�Ƅ�Molex�ӏ���܇�I��İlչ
- ...�� �Ї��Gɫ�����˳���������_�ڼ� ���a�W���ù�̽�Gɫ�lչ��ģʽ
- ...�� Efinix® ȫ����AI߅��Ӌ�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r���aƷ�Uչ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M���������I�ǻ�������
- ...�� ��늮aƷ�_�l���yԇ��ӑ����������Դ�����ɹ��e��
- ...�� Manz���ǿƼ�����댧�w�I�� ����弉�ȳ��ͷ��b�ṩ���W���Ƴ̡�Ϳ�������⑪�õ����a�O���Q����
- ...�� ������ABITRODE����늳yԇϵ�y���������������Դ
- ...�� ������AFTFϵ��늳yԇϵ�y�И˱�������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ�dϵ�y�ɹ����������؈
- ...�� ������A���H��늄���܇���P�I�����y�u��ӑ�������[���M�y�u���g




- ...�� �����ɼ��K��ϵ�y�O��
- ...�� ���x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|�J�C����܇ϵ�ЮaƷӋ��
- ...�� ���`˼® �����U������� ⁽�ϵ��™ FPGA �aƷ ⁽�ϵ�ЮaƷ�U�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_�e� (TSMC) 16�{��ˇ���c��Ƭ
- ...�� TI��2019��ȫ����W������OӋ��ِ�C����Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C�@��ȫ���ׂ���܇��ȫ�����Եȼ�(ASIL) ��D���J�C
- ...�� ���R��܇�x��BlackBerry������һ����܇