
����LabVIEW �c PXI��(chu��ng)������SPring-8����ͬ������ݗ���O(sh��)����������\��ϵ�y(t��ng)
��λ��Ȧֱ���e�ִň�(ch��ng)�y(c��)��ϵ�y(t��ng)
��ͨ�^ʹ��LabVIEW�D�λ��ľ����c���ຯ��(sh��)���҂����Ժ�����(chu��ng)���c�y(c��)ԇ��(n��i)������(y��ng)�Ŀ��Ƴ���
�C ���� �� ��, �|����W(xu��)�����о��� ܉�����������о�ʩ�O(sh��)
����(zh��n)��
��(chu��ng)��һ��ϵ�y(t��ng)�Կs�̈�(zh��)��ֱ��(DC)�e�ִň�(ch��ng)�y(c��)���ĕr(sh��)�g��
��Q������
ʹ��NI LabVIEW ��(sh��)�r(sh��)ģ�K�c NI PXIӲ���턓(chu��ng)��һ��(g��)��λ��Ȧֱ��(DC)�e�ִň�(ch��ng)�y(c��)��ϵ�y(t��ng)��
����:
���� �� �� - �|����W(xu��)�����о��� ܉�����������о�ʩ�O(sh��)
�|����W(xu��)���о��ˆT�ڴ���ͬ������ݗ���O(sh��)��SPring-8 (�D1)�Ļ��A(ch��)�Ͻ����˸ߏ�(qi��ng)�ȵ�ܛX�侀�l(f��)���������ڼ�˲��ϿƌW(xu��)�о���
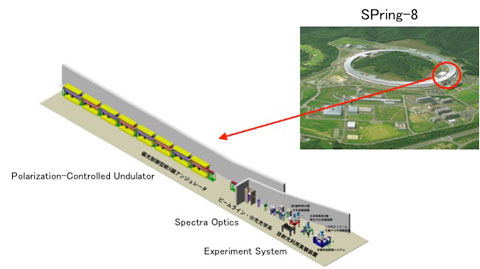
�D 1. �ߏ�(qi��ng)��ܛX�侀�l(f��)���������ڲ��ϿƌW(xu��)�о�
����?c��)������l(f��)�����а��b��һ��(g��)�O�����Ʋ�ʎ�����D(zhu��n)׃ͬ������ݗ��ĘO��(�D 2)����ʎ����һ�Nͨ�^�؏�(f��)�؏��������܉�����a(ch��n)���ߏ�(qi��ng)��ͬ������ݗ����b�á�
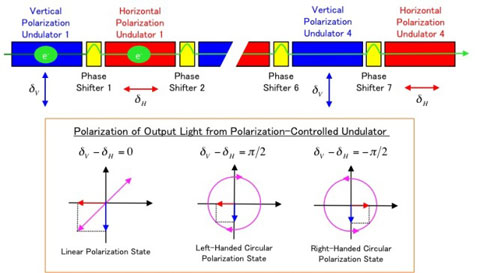
�D 2. �O�����Ʋ�ʎ����ԭ��
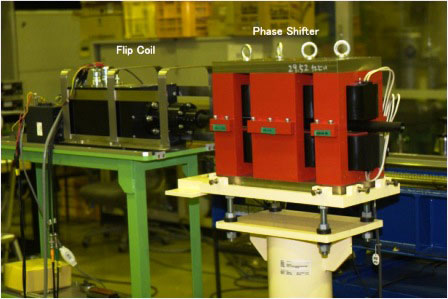
�O�����Ʋ�ʎ�����Ă�(g��)�a(ch��n)��ˮƽ�O���IJ�ʎ���c�Ă�(g��)�a(ch��n)����ֱ�O���IJ�ʎ���M�ɡ���ʎ���c늴������������������_�����������������K�O��늴��F����˘O��Ҳ�ǽ���ġ���(d��ng)�������ܵ�����(l��)����(hu��)�a(ch��n)��������׃���Ĵň�(ch��ng)����(d��ng)�����ͨ�^��׃�ň�(ch��ng)��������܉�\(y��n)�С�܉��(hu��)��ˮƽ�c��ֱ�O��֮�g�a(ch��n)����λ�ͨ�^������λ��Լ��B��ˮƽ�c��ֱ�O�����Ϳ��Ԯa(ch��n)�����O���c��/�҈A�O����
����ʹ�ØO�����Ʋ�ʎ���a(ch��n)�����|(zh��)����ͬ������ݗ�䣬��������횝M��ׂ�(g��)�l����������
1. �������Ĵň�(ch��ng)��(y��ng)��(d��ng)���г��m(x��)��(w��n)����ݔ�����Ķ�����(hu��)����ͬ������ݗ����|(zh��)����������������(g��)�����܉���ď����Լ�����(d��ng)��
2. ��(d��ng)�����ͨ�^�������r(sh��)���ܵ��Ĵň�(ch��ng)��(y��ng)��(d��ng)�ӽ����㣬�@���������܉����܉ǰ��Ͳ���(hu��)��̫��ĸ�׃���Q��Ԓ�f����������ݔ�뵽ݔ��֮�g�Ĵň�(ch��ng)�e��ֵ(�����У��҂��Q֮��e�ִň�(ch��ng)[G・cm])��(y��ng)ԓ�M���ܽӽ��㡣
���˝M���@Щ�l�����҂�?c��)O(sh��)Ӌ(j��)������һ��(g��)������ԭ�͙C(j��)(�D3)��
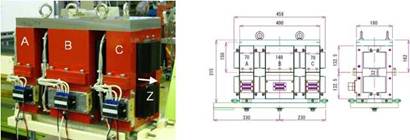
�D 3. ������ԭ�͙C(j��)�����^�D�cʾ��D
��(du��)��������Ҫ��������u(p��ng)�����҂����Üy(c��)��ֱ��(DC)�ň�(ch��ng)�ķ�ʽ�����_�l(f��)����NIܛӲ����ϵ�y(t��ng)֮ǰ���҂������֘�(g��u)���ɻ���̽�^�c���S�\(y��n)��(d��ng)�b�ýM�ɵ�ֱ���ň�(ch��ng)�y(c��)��ϵ�y(t��ng)��
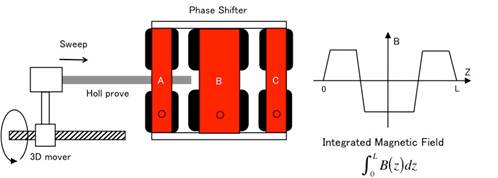
�D 4. ʹ�û���̽�^�c���S�\(y��n)��(d��ng)�b�õ�ֱ���e�֜y(c��)��ϵ�y(t��ng)
�@��ϵ�y(t��ng)����ͨ�^���S�\(y��n)��(d��ng)�b�þ����،�����̽�^������������y(c��)���ň�(ch��ng)�ֲ�������(du��)�Ƅ�(d��ng)���x��(zh��)�зe�֡��M����ˣ��@�������ԁ��u(p��ng)���l��(1)����?y��n)��@��ϵ�y(t��ng)ֻ��(du��)ij��(g��)λ���M(j��n)�Д�(sh��)ֵ�y(c��)�����u(p��ng)���ň�(ch��ng)�ķ�(w��n)�����c�؏�(f��)�ԡ����⣬�����@��ϵ�y(t��ng)��ͨ�^�������Ƅ�(d��ng)����̽�^���^��������ݔ���cݔ���ځ�y(c��)��ֱ���ň�(ch��ng)�ֲ�����Ҫ���M(f��i)��s����(g��)С�r(sh��)����ɜy(c��)���������ܜض�Ӱ푵��Դ�c�y(c��)���O(sh��)�䌦(du��)���u(p��ng)���l��(2)���f�DZز����ٵġ���ˣ��҂��_�l(f��)�˷�λ��Ȧֱ���e�ִň�(ch��ng)�y(c��)��ϵ�y(t��ng)���Ķ����ٵأ��߾��ȵy(c��)��ֱ���e�ִň�(ch��ng)��
�D5�@ʾ���ɷ�λ��Ȧ��(zh��)��ֱ���e�ִň�(ch��ng)�y(c��)����ԭ��D��
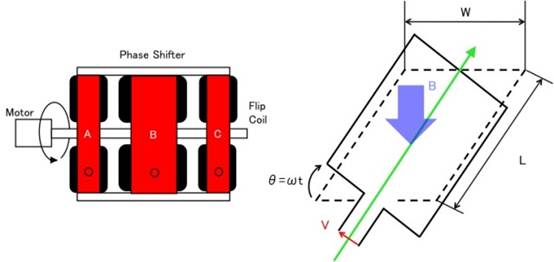
�D 5. ʹ�÷�λ��Ȧ�M(j��n)��ֱ���ň�(ch��ng)�y(c��)����ԭ��
��D5��ʾ����(d��ng)һ��(g��)��Ȧ(�є�(sh��) = N, �L�� = L, ���� = W)��ֱ���ň�(ch��ng)(B0)��(n��i)�D(zhu��n)��(d��ng)�r(sh��)����Ȧ��(n��i)��(hu��)�a(ch��n)���Б�(y��ng)늉�(V)�������з�����ʾ��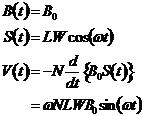
Furthermore, when the induction voltage is integrated by the rotation time, integral magnetic field (B0L) is solved by the following equation:
���⣬��(d��ng)ʹ���D(zhu��n)��(d��ng)�r(sh��)�g��(du��)�Б�(y��ng)늉��M(j��n)�зe�֕r(sh��)���e�ִň�(ch��ng)(B0L)�������µķ��́���⣺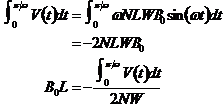
Because this method performs the measurement within the flip coil rotation time, it is not affected by the temperature dependence in the power supplies and the measurement devices.
��?y��n)��@�N�����ڷ�λ��Ȧ�D(zhu��n)��(d��ng)�r(sh��)�g��(n��i)��(zh��)�Мy(c��)�������Բ��܌�(du��)�ض���ه�^����Դ�c�y(c��)���b�õ�Ӱ푡�
ϵ�y(t��ng)����
��λ��Ȧֱ���e�ִň�(ch��ng)�y(c��)��ϵ�y(t��ng)��횝M������Ҫ��
A. ���ƾ�Ȧ�����ʹ����г�ֵľ��ȣ���(w��n)���ԣ��Լ��؏�(f��)�ԣ��Ķ��a(ch��n)��һ��(g��)�M���ܽӽ���ķe�ִň�(ch��ng)(����ֵ, 1 mA �����)��
B. ��(zh��)�Д�(sh��)��(j��)�ɼ��r(sh��)���г�ֵľ��ȣ��Ķ����Ԝy(c��)���ӽ�����ķe�ִň�(ch��ng)(����ֵ, 10 G cm �����)��
- �ڲ��M(j��n)�R�_(d��)�����c�e�ִň�(ch��ng)�y(c��)��֮�g����ͬ�����c�_���ԣ��Ķ�����ͨ�^���D(zhu��n)��λ��Ȧ��y(c��)���Б�(y��ng)늉���
- �x���Ñ�(chu��ng)���c�y(c��)ԇ��(n��i)������(y��ng)�Ŀ��Ƴ����������
�C�Ͽ��]�@Щ�����҂��x����NI LabVIEW��(sh��)�r(sh��)ģ�K �c NI PXI ϵ�y(t��ng)�혋(g��u)����λ��Ȧֱ���e�ִň�(ch��ng)�y(c��)��ϵ�y(t��ng)��
ϵ�y(t��ng)�Y(ji��)��(g��u)
�D6�@ʾ�˷�λ��Ȧֱ���e�ִň�(ch��ng)�y(c��)��ϵ�y(t��ng)�����^�D�c��D��
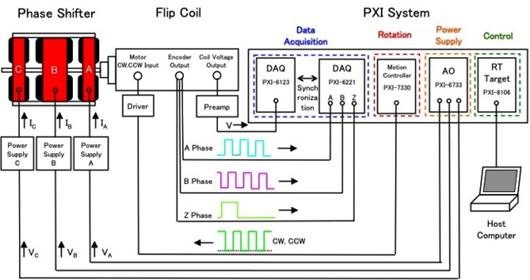
�D 6. ��λ��Ȧֱ���e�ִň�(ch��ng)�y(c��)��ϵ�y(t��ng)�����^�D�c��D
��λ��Ȧ����һ��(g��)600 mm �� 5 mm�IJ���䓾��S���p�@��10Ȧֱ����0.2 mm���~�����҂�ʹ��һ��(g��)�|���R�_(d��)(Oriental Motor)��˾��RK566BE���M(j��n)�R�_(d��)���D(zhu��n)��(d��ng)��Ȧ���D(zhu��n)�ٞ�180��/0.5�C1 s���҂�ʹ�ÚWķ����˾��E6B2-CWZ6C����ʽ���a����y(c��)����Ȧ�D(zhu��n)��(d��ng)�Ƕȡ�
�҂�ʹ��NI PXI-6123ͬ���ɘӶ�ܔ�(sh��)��(j��)�ɼ�(DAQ)�O(sh��)�䣬NI PXI-6221 ���Mϵ��DAQ�O(sh��)�䣬NI PXI-6733 ����늉�ݔ��ģ�K��NI PXI-7330 �\(y��n)��(d��ng)���������Լ� NI PXI-8106 Ƕ��ʽ�������혋(g��u)����λ��Ȧ����ϵ�y(t��ng)���҂�ʹ��LabVIEW Real-Time�Є�(chu��ng)����VI�������@Щ�O(sh��)�䡣
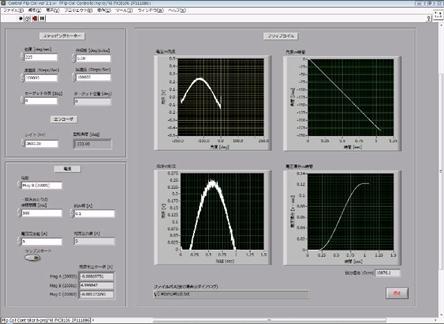
�D 7. ��λ��Ȧ������VI �����Ʒ�λ��Ȧ.vi����ǰ���
��(du��)�ڿ����^�́��f���҂���PXI-6733����һ��(g��)�ⲿ������̖(h��o)�o�Դ���Դ���c�ⲿ������̖(h��o)����(y��ng)�����ݔ�͵������������ͽo������������q�䲨�Α�(y��ng)ԓ������ÿ��0.1 A�ԃ�(n��i)����(d��ng)��������ֱ���������(l��)�r(sh��)���\(y��n)��(d��ng)�������D(zhu��n)��(d��ng)��λ��Ȧ��ͨ�^�ɂ�(g��)DAQ�O(sh��)���ͬ��(20 MHz)��λ��Ȧ�D(zhu��n)��(d��ng)�Ƕ�(���a��̖(h��o))�c������ֱ���ň�(ch��ng)(��λ��Ȧ�Б�(y��ng)늉�)���y(c��)����(sh��)��(j��)�Ϳ��Ա��ռ�����?y��n)鷴λ��Ȧ�Б�(y��ng)늉��������҂�ʹ�õ�����ǰ�÷Ŵ������M(j��n)�зŴ��҂�ʹ�÷���a �� b���y(c��)���ĸБ�(y��ng)늉��D(zhu��n)���ɷe�ִň�(ch��ng)��ǰ�����漰�Ŀ����^�̶��Ɍ�(sh��)�r(sh��)����ϵ�y(t��ng)(OS)���(zh��)�С��D7�@ʾ�˷�λ��Ȧ������VI �����Ʒ�λ��Ȧ.vi�� ��ǰ��塣
�Y(ji��)��
���������PXI-6733����ݔ��һ��(g��)���Ȟ�0.3 mV��ģ�M��̖(h��o)�����ͨ�^����ģ�M��̖(h��o)ݔ���Դ���ⲿ������̖(h��o)�ˣ�����������������Ϳ��Կ�����0.3 mA�ľ��ȡ��@�Ӿͳ��(sh��)�F(xi��n)�˗l��A��
PXI-6123����һ��(g��)16λ��ģ��(sh��)�D(zhu��n)�Q��(ADC)�������Ԝy(c��)���^С���1.25 V�Ą�(d��ng)�B(t��i)���������������þ��Ȟ�2.5 V/216=40 ��V��ʹ�ô�DAQģ�K�Լ������20dB�ĵ���ǰ�÷Ŵ������҂����Ԍ�(sh��)�F(xi��n)0.4 ��V (40 ��V/100)�ľ��ȡ�ͨ�^����b��0.4 ��V�ľ����D(zhu��n)�Q��e�ִň�(ch��ng)���õ���ֵ��2 G x cm���@��Ҳ�ͳ�֝M���˗l��B��(du��)���ȵ�Ҫ��
��?y��n)�늉�ݔ��ģ�K�cDAQģ�K����ʹ������ͬ�ĕr(sh��)�����(20 MHz)���҂����Ԍ����������Դ�c�e�ִň�(ch��ng)�y(c��)��ͬ������(sh��)�F(xi��n)50 ns�ľ��_�ȡ����⣬��?y��n)�?n��i)�õ�PXI-8106���������Ќ�(sh��)�r(sh��)����ϵ�y(t��ng)(OS)�����Ƴ���(hu��)���κ��Д������t����(zh��)�еĕr(sh��)�g�_���Ԟ��뼉(j��)�e���@һ�c(di��n)��֝M���˗l��C��
ͨ�^ʹ�� LabVIEW �D�λ��ľ����c����ܣ��҂����Ժ�����(chu��ng)���c�y(c��)ԇ��(n��i)������(y��ng)�Ŀ��Ƴ������磬�҂����Ժ�����ͨ�^NI-DAQmx�����c�`����팍(sh��)�F(xi��n)�\(y��n)��(d��ng)�������c�ɂ�(g��)DAQģ�K֮�g��ͬ�������⣬�҂�����ʹ��LabVIEW��������(chu��ng)����X���ο��Ƴ��Ķ�����������������ĕr(sh��)����ߺ㶨�r(sh��)�g�g�������ֵ���@һ
���P(gu��n)��x:
- ...2015/01/29 14:35�����ڣ̣��֣ɣţ� ����������ϵ�y(t��ng)���о�
- ...2013/12/03 14:27������LK����ˮ̎��SPLCϵ�y(t��ng)
- ...2013/01/04 16:30�����ڣ̣��֣ɣţ� �ģˣףУ��������f(xi��)�h����ͨ�ŵČ�(sh��)�F(xi��n)
- ...2012/08/28 14:37�������Д_���l�� ����LabVIEW��NI USRP�M(j��n)�����l/ͨ��������о�
- ...2012/08/21 10:43������LabVIEW�_�l(f��)��Ӱ�@ʾϵ�y(t��ng)
- ...2012/05/17 09:44������LM PLC���Ƶ�̫����Ԅ�(d��ng)��ۙϵ�y(t��ng)
- ...���D��Ԕ����܇�x���屳���܇Ҏ(gu��)��(j��)��ȫ�O(sh��)Ӌ(j��)Ҫ��
- ...��ʹ���а�ȫ���ϵ��W��惦(ch��)��(g��u)����ȫ����܇ϵ�y(t��ng)
- ...������ƫ�ò�־��Ԃ��������^���M(j��n)չ�͑�(y��ng)��
- ...�����¿�˹�y(c��)�u(p��ng)ijƷ�����ܲ����������C(j��)����ƪ
- ...���������ʽ�ضșz�y(c��)���y(c��)��ϵ�y(t��ng)�Є�(l��)�����ʧ���Ӱ�(�m(x��))
- ...���������ʽ�ضșz�y(c��)���y(c��)��ϵ�y(t��ng)�Є�(l��)�����ʧ���Ӱ�
- ...��RTD�y(c��)��ϵ�y(t��ng)�Є�(l��)�����ʧ���Ӱ�
- ...���{(l��n)��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^(q��)�e
- ...��IoT�W(w��ng)�P(gu��n)ƽ�_(t��i)�c��(y��ng)��
- ...������(qi��ng)��ARM DesignStart��ͨ���ƻ�SoC���^�졢�^���L(f��ng)�U(xi��n)֮·
- ...����(sh��)�w�����D(zhu��n)��O2O���}��(ch��)���������ܻ�ˮƽ�ĺ�������
- ...���N܇��LED�(q��)��(d��ng)�����ı��^
- ...���{(l��n)���䌦(du��)�ڶ�ƪ��������ɷ���
- ...��������A�Ƴ��I(l��ng)�ȵğo����(sh��)��(j��)�ɼ���Q����
- ...����ɭ���댧(d��o)�w����Ј�(ch��ng)څ��(sh��)�ğo����늷���
- ...����ɭ���댧(d��o)�w�����܇�����O(sh��)Ӌ(j��)څ��(sh��)�Ľ�Q����



- ...�� ��о��(chu��ng)�����ø�Уδ����܇�˙C(j��)�����O(sh��)Ӌ(j��)��ِ��(b��o)����ʽ����(d��ng)
- ...�� ̽�صڶ����l(w��i)�{(l��n)ɽ������(chu��ng)�¡�������ԇ�(y��n)���g(sh��)Փ����
- ...�� ��2018�Ї��댧(d��o)�w���B(t��i)朴��(hu��)���ڽ��Kʡ�����e��
- ...�� �����}��Ҏ(gu��)����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�(chu��ng)������ܵ�����
- ...�� �ⷨ�댧(d��o)�w��ST����Cinemo��Valens��CES 2018չ��(li��n)����ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a(ch��n)�I(y��)��(chu��ng)�°l(f��)չ�߷�Փ�������ھ����_
- ...�� ����늙C(j��)��(qi��ng)��(sh��)����PCIM����2017չ
- ...�� GPGPU���a(ch��n)������Ї�оƬ�a(ch��n)�I(y��)�Ŀհ؎�
- ...�� ��(li��n)�W(w��ng)�a(ch��n)Ʒ�O(sh��)Ӌ(j��)��Wi-Fi�B�ӵ��Ă�(g��)�P(gu��n)�I����
- ...�� �������Ї�MEMS���܂������a(ch��n)�I(y��)�l(f��)չ���(hu��)�����ڰ������_�Ļ
- ...�� IAIC���(xi��ng)ِ���[���Ї�о����(y��ng)�Ä�(chu��ng)�£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �y(c��)ԇ���g(sh��)
- ...�� ����(g��)�Ј�(ch��ng)�������L�Ƅ�(d��ng)Molex�ӏ�(qi��ng)��܇�I(l��ng)��İl(f��)չ
- ...�� �Ї��Gɫ����(li��n)�˳������(hu��)���_�ڼ� ���a(ch��n)�W(xu��)���ù�̽�Gɫ�l(f��)չ��ģʽ
- ...�� Efinix® ȫ���(q��)��(d��ng)AI߅��Ӌ(j��)�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r(sh��)���a(ch��n)Ʒ�U(ku��)չ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M(j��n)����(hu��)�����I(l��ng)�ǻ�������
- ...�� ��늮a(ch��n)Ʒ�_�l(f��)���y(c��)ԇ��ӑ��(hu��)��������Դ����(ch��ng)�ɹ��e��
- ...�� Manz���ǿƼ�����댧(d��o)�w�I(l��ng)�� ����弉(j��)�ȳ��ͷ��b�ṩ���W(xu��)���Ƴ̡�Ϳ�������⑪(y��ng)�õ����a(ch��n)�O(sh��)���Q����
- ...�� ������ABITRODE��(d��ng)��늳y(c��)ԇϵ�y(t��ng)���������������Դ
- ...�� ������AFTFϵ��늳y(c��)ԇϵ�y(t��ng)�И�(bi��o)��������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ(f��)�dϵ�y(t��ng)�ɹ����������؈
- ...�� ������A���H��늄�(d��ng)��܇���P(gu��n)�I�����y(c��)�u(p��ng)��ӑ��(hu��)�����[���M(j��n)�y(c��)�u(p��ng)���g(sh��)




- ...�� ��(sh��)��(j��)�ɼ��K��ϵ�y(t��ng)�O(sh��)��
- ...�� ��(ji��n)�x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|(zh��)�J(r��n)�C����܇ϵ�Юa(ch��n)ƷӋ(j��)��
- ...�� ���`˼® �����U(ku��)������� ⁽�ϵ��™ FPGA �a(ch��n)Ʒ ⁽�ϵ�Юa(ch��n)Ʒ�U(ku��)�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_(t��i)�e� (TSMC) 16�{��ˇ��(ji��)�c(di��n)��Ƭ
- ...�� TI��2019��ȫ����W(xu��)������O(sh��)Ӌ(j��)��(j��ng)ِ�C��(ji��ng)��Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C(j��)�@��ȫ���ׂ�(g��)��܇��ȫ�����Եȼ�(j��)(ASIL) ��D���J(r��n)�C
- ...�� ���R��܇�x��BlackBerry������һ����܇