
��(g��)�ˌ�(d��o)���x�е�MEMS����������
���ߣ�Jay Esfandyari1, Massimo Mascotto, Gang Xu
1�ⷨ�댧(d��o)�w
�Ԓ: 972-971-4969; Fax: 972-466-7352
Email: jalinous.esfandyari@st.com
�S��MEMS���������O(sh��)Ӌ(j��)�����칤ˇ���M(j��n)����MEMS�������������V�������t(y��)������܇�����M(f��i)��ӵȑ�(y��ng)���I(l��ng)�����磬���������������ڱO(ji��n)�yѪ������܇�S�����Ú≺��������(y��u)���l(f��)��(d��ng)�C(j��)��Ч�������{�T݆̥�≺���㡣
�^�����꣬�S��MEMS���������������ܲ�����ߣ��ɱ��ͳߴ粻�ཱུ�ͣ����M(f��i)��ӏS���_ʼʹ�É����������c�T�Ԃ������͵شł�����ģ�M��(sh��)�F(xi��n)��λ�Ɯy�͌�(d��o)�����ܡ�
����Փ������ڂ�(g��)�ˌ�(d��o)���x��(n��i)����MEMS�����������o��GPS�������y�����θ߶ȡ����ĵ�һ���ָ�����≺�c���θ߶ȵ��P(gu��n)ϵ���ڶ����T�������ʹ�É���������Ӌ(j��)�㺣�θ߶ȡ��������ֽ�B�����һ��(g��)��(g��)�ˌ�(d��o)���x�������֙C(j��)��(n��i)���ɉ�����������
1. ��≺�c���θ߶ȵ��P(gu��n)ϵ
�ڂ�(g��)�ˌ�(d��o)���x�У�MEMS�����������䮔(d��ng)�≺Ӌ(j��)���ڜy�����θ߶�׃������ˣ��҂�����˽ⲻͬ�߶ȵĴ�≺��
�����Ǵ�≺�y����λ��
- psi �C ��/ƽ��Ӣ��
- cm/Hg �C ˮ�y���ߣ����ף�
- cm/Hg �C ˮ�y���ߣ�Ӣ�磩
- Pa �C �������H�Ɖ�����λ (SI) ��1Pa = 1 N/m2
- bar �C �ͣ��≺��λ��1 bar = 105Pa
- mbar �C ���ͣ�1mbar = 10-3 bar
�҂���ס�ڵ�����ӵĵӣ���≺�S�����θ߶����������͡��҂�����59 �H�r(sh��)��29.92 in/Hg��ƽ��≺Ҏ(gu��)�����(bi��o)��(zh��n)��≺���@��(g��)ƽ��ֵ���ܕr(sh��)�gӰ푣����ܵ��y���c(di��n)�ĵ���λ�á���غ͚�����Ӱ푡�
��ˣ�����������λ֮�g�ēQ���P(gu��n)ϵ��:
1 ��(g��)��(bi��o)��(zh��n)��≺ = 14.7 psi = 76 cm/Hg = 29.92 in/Hg = 1.01325 bar = 1013.25 mbar
����������ı��_(d��)ʽ��ʾ��≺�c���θ߶�֮�g�P(gu��n)ϵ [1]: 
����:
P0 �ǘ�(bi��o)��(zh��n)��≺������1013.25 mbar;
Altitude�����מ��λ�ĺ��θ߶ȡ�
P����ijһ�߶ȵ���mbar���λ�Ě≺
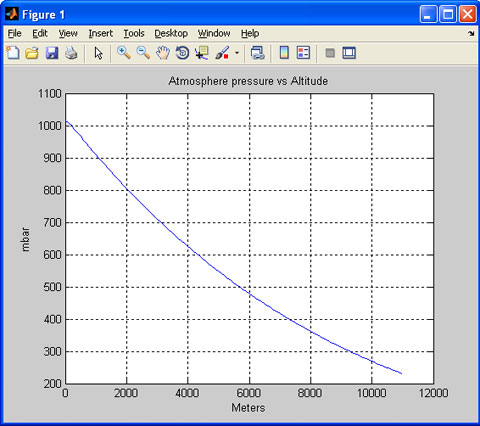
�D1����(j��)����Ĺ�ʽ�����˴�≺׃���c���θ߶ȵ��P(gu��n)ϵ��
��D1��ʾ����(d��ng)�߶ȏĺ�ƽ������������11,000�ߕr(sh��)����≺��1013.25 mbar����230 mbar���҂��ĈD�в��y��������(d��ng)�߶ȵ��� 1,500�וr(sh��)����≺���ʾ��Խ��ͣ�ÿ100�״�s����11.2 mbar����ÿ10�״�s����1.1 mbar������ȡ�ø����_�ĸ߶Ȝy����(sh��)��(j��)��������Ŀ��(bi��o)��(y��ng)���И�(g��u)��һ��(g��)��≺�߶Ȳ�ԃ��������(j��)�����������Ĝy���Y(ji��)�����_������(y��ng)�ĺ��θ߶ȡ�
���ʹ��ȫ���̞�300 mbar��1100 mbar�Ľ^��MEMS�������������y���߶ȿ��_(d��)����9,165����ƽ������698�ס�
�D 1: ��≺�c���θ߶ȵ��P(gu��n)ϵ
2. ����MEMS�������_���nj�
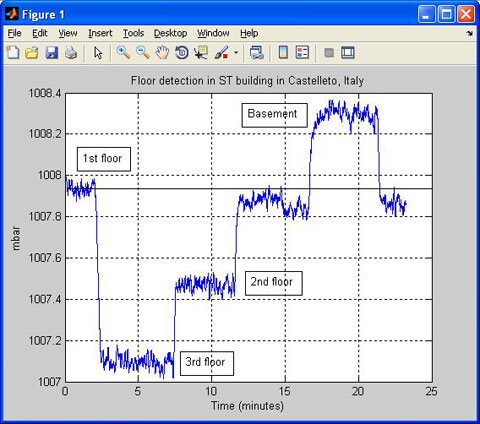
0.1 mbar rms�Ĝy���ֱ���ʹMEMS�����������܉�l(f��)�F(xi��n)��1���ԃ�(n��i)�߶�׃������ˣ��ڸߌӽ�����(n��i)������ʹ�É����������l(f��)�F(xi��n)�nj�׃����
�D2��ʾ�����ⷨ�댧(d��o)�w�������Castelletto���֘ǃ�(n��i)�ɼ����ĉ�����������(sh��)��(j��)���ɘ�������7Hz����(sh��)��(j��)�ɼ��r(sh��)�g��Ӌ(j��)��s23��犡��ĈD���҂����������ؿ�����≺�ڲ�ͬ�njӵ�׃������≺�ڵ������^�ߡ��S���nj����ߣ���≺��u���͡�
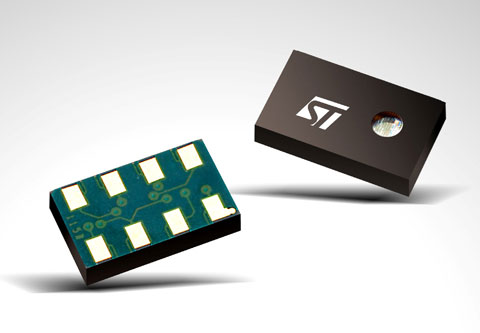
�D3��ʾ���ⷨ�댧(d��o)�w��һ��(g��)MEMS�������������@��һ��(g��)����3 x 5 x 1mm LGA-8���b�Ĕ�(sh��)��ݔ����������������(n��i)��I2C/SPI�ӿں�16λ��(sh��)��(j��)ݔ����������300 mbar��1100 mbar���ֱ��ʞ�0.1mbar��ԓоƬ߀��(n��i)�ÜضȂ�������оƬ��(n��i)�����ƼĴ�������ָʾ�y���Y(ji��)���Ǹ���߀�ǵ��ډ����O���A(y��)�O(sh��)ֵ��
�����������Ĝy�����ȕ�(hu��)�ܵ����������l����Ӱ푡�����ȡ�þ��_���ɿ��ĘnjӜy���Y(ji��)������Ҫ�鉺���������_�l(f��)У��(zh��n)�͞V���㷨��
�D 2: ���ⷨ�댧(d��o)�w������ԭʼ��(sh��)��(j��)ȡ�õĘnjәz�y�Y(ji��)��
�D 3: �ⷨ�댧(d��o)�w��MEMS����������
3. �ڂ�(g��)�ˌ�(d��o)���x��ʹ��MEMS����������
�ڮ�(d��ng)ǰ�������N�۵������֙C(j��)�У������(sh��)����(n��i)����GPS�������͵ͳɱ���MEMS�\(y��n)��(d��ng)�����������磬���ٶ�Ӌ(j��)�����݃x��/�����Ӌ(j��)���ڛ]��GPS�l(w��i)����̖(h��o)�Ľ������(n��i)��GPS��̖(h��o)�����ĸߘ������Ĵ��Ѓ�(n��i)����(g��)�ˌ�(d��o)����λ�Ɯy���ڌ�(d��o)��׃�÷dz���Ҫ���b��GPS�������ڑ��(n��i)����y���߶ȶ����_���������֙C(j��)��(n��i)���ɉ��������������o��GPS�y���߶ȡ�
��(g��)�ˌ�(d��o)��ϵ�y(t��ng)��PNS���c��(g��)�˺�λ�Ɯy��PDR��ϵ�y(t��ng)���ơ��Ļ���ԭ��������(d��ng)�o���@��GPS�l(w��i)����̖(h��o)�r(sh��)��PNS��PDR�����������֙C(j��)����ӵ؈D���^�m(x��)�ṩ��λ��ǰ�M(j��n)��Ϣ������(d��o)�Ñ����_(d��)�dȤ�c(di��n)���@��λ���P(gu��n)(li��n)����(w��)(LBS)��
ǰ�M(j��n)��Ϣ���ԁ��Դ���Ӌ(j��)�����݃x����ߵ�ģ�M��PNS�����ÑT�Ԍ�(d��o)��ԭ����INS�������ٶ�Ӌ(j��)�Ĝy��ֵ�M(j��n)���p�طe�����Q��λ��Ϣ����PDR��Ӌ(j��)�����Ͳ��L����������(j��)����Ӌ(j��)����ԭ��Ӌ(j��)����ٶ�Ӌ(j��)�ṩ�Ĝy����(sh��)��(j��)���@�õķ�λ��Ϣ����һ���r(sh��)�g��(n��i)�@��ǰ�M(j��n)��������M(j��n)·�̵���Ϣ��(d��o)��ϵ�y(t��ng)�������֙C(j��)����ӵ؈D�ϸ��������ڑ��(n��i)�ķ�λ��
3.1 PNS�� PDR�Y(ji��)��(g��u)ʾ��D
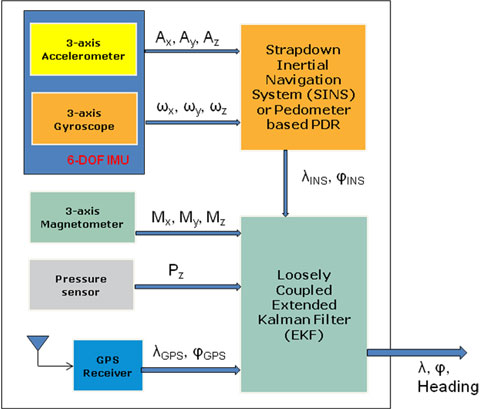
�D4��ʾ��PNS��PDR�ĽY(ji��)��(g��u)ʾ��D���Ă������Ƕȿ���ԓϵ�y(t��ng)����һ��(g��)3�S���ٶ�Ӌ(j��)��һ��(g��)3�S���݃x��һ��(g��)3�S����Ӌ(j��)��һ��(g��)���������������⣬���@��(g��)ʾ��D��(n��i)߀��һ��(g��)GPS��������һ��(g��)��̎��������̎�������ڲɼ���������(sh��)��(j��)���\(y��n)�к�λ�Ɯy�㷨�Ϳ������V���㷨��
�D 4: PNS�� PDR�Y(ji��)��(g��u)ʾ��D
�D4��ÿ��(g��)�M���ă�(y��u)ȱ�c(di��n)�w�{���£�
�� GPS������:
o ��(y��u)�c(di��n)��GPS�����ṩ�M(j��n)�뽨����ǰ�ij�ʼ��λ���z������ƫ�D(zhu��n)����Ϣ������(j��)����ǰ�M(j��n)������������Ӌ(j��)ǰ�M(j��n)����(d��ng)GPS��̖(h��o)����(qi��ng)�r(sh��)У��(zh��n)Ӌ(j��)��(sh��)�����L���քe��T�Ԍ�(d��o)��ϵ�y(t��ng)������Ϻ;o��Ͽ������V���㷨�ṩ�н�ľ��_��λ��Ϣ����(j��ng)���ȣ�ݔ���͂ξ�ԭʼ�y��ݔ����
o ȱ�c(di��n)����(d��ng)���˱����oֹ�r(sh��)��GPS�o���_��ǰ�M(j��n)���o���z�y�߶ȣ����θ߶ȣ��ļ�(x��)׃����
�� ���ٶ�Ӌ(j��):
o ��(y��u)�c(di��n)�����o�B(t��i)�������\(y��n)��(d��ng)��B(t��i)�¿����ڃAб�������͔�(sh��)���_�P���ھ��Լ��ٶȠ�B(t��i)�¿�����Ӌ(j��)�����ęz�y���ܣ����ڙz�y�����ˮ�(d��ng)ǰ�Ġ�B(t��i)���oֹ߀���\(y��n)��(d��ng)��
o ȱ�c(di��n)����(d��ng)�����֙C(j��)���D(zhu��n)�r(sh��)���o���ĵ��������M���Ѕ^(q��)�e�����ľ��Լ��ٶȣ�������(d��ng)����ʎ�^������
�� ���݃x:
o ��(y��u)�c(di��n)���܉���T�Ԍ�(d��o)��ϵ�y(t��ng)�B�m(x��)�ṩ���D(zhu��n)��ꇣ���(d��ng)����Ӌ(j��)�ܵ��ɔ_�r(sh��)���o����(sh��)���_�PӋ(j��)��ǰ�M(j��n)������Ϣ
o ȱ�c(di��n)���L�r(sh��)�g����ƫƯ�ƌ�(d��o)�o��INS��λ�e(cu��)�`��
�� ����Ӌ(j��):
o ��(y��u)�c(di��n)���܉����(j��)�شű��OӋ(j��)�㾫�_��ǰ�M(j��n)�����܉�����У��(zh��n)���݃x���`���ȡ�
o ȱ�c(di��n)�������ܵ��h(hu��n)���ň��ɔ_
�� ����������:
o ��(y��u)�c(di��n)�����҃�(n��i)��(d��o)����(y��ng)���пɅ^(q��)�֘njӣ���(d��ng)GPS�l(w��i)����̖(h��o)�^���r(sh��)�����o��GPSӋ(j��)��߶ȣ���߶�λ���_�ȣ�
o ȱ�c(di��n)�������ܵ�����������r��Ӱ푡�
3.2 PNS��PDR�Č�(sh��)�F(xi��n)��ʽ
�ЃɷN���������������֙C(j��)�ό�(sh��)�F(xi��n)PNS��PDR��(d��o)������һ�N���������ý�(li��n)ʽ�T�Ԍ�(d��o)��ϵ�y(t��ng)(SINS)��(sh��)�F(xi��n)PNS���ڶ��N����������Ӌ(j��)����������(sh��)�F(xi��n)PDR���@�ɷN�������и��Եă�(y��u)�c(di��n)��ȱ�c(di��n)��
��(li��n)�T��(d��o)ϵ�y(t��ng)�ǻ���һ��(g��)3�S���ٶ�Ӌ(j��)��һ��(g��)3�S���݃x��6���ɶ�(DOF)�T�Ԝy����Ԫ����(li��n)�T��(d��o)ϵ�y(t��ng)���ɹ������⚤���Ժ�(qi��ng)���O(sh��)���(n��i)�����磬�T�Ԝy����Ԫ���������b����܇�͌�(d��o)����(n��i)��ԓϵ�y(t��ng)�ڶ̕r(sh��)�g��(n��i)�Ķ�λ���������^�ߡ���?y��n)�ͳɱ�MEMS�\(y��n)��(d��ng)����������ƫƯ�Ɔ��}����(d��ng)�]��GPS�l(w��i)����̖(h��o)�r(sh��)����(j��ng)�^�e�ֺͶ��طe���\(y��n)���λ�`���(hu��)�S�r(sh��)�g���ƶ�׃���⣬����ͨ���������֙C(j��)�����´�����������ϣ������S�r(sh��)����(hu��)���´����������ȡ���֙C(j��)�鿴��(d��ng)ǰ���ڷ�λ���@�����f�������֙C(j��)�c�Ñ����w������λ�ò��̶���
���^��S
���P(gu��n)��x:
- ...���D��Ԕ����܇�x���屳���܇Ҏ(gu��)��(j��)��ȫ�O(sh��)Ӌ(j��)Ҫ��
- ...��ʹ���а�ȫ���ϵ��W��惦(ch��)��(g��u)����ȫ����܇ϵ�y(t��ng)
- ...������ƫ�ò�־��Ԃ��������^���M(j��n)չ�͑�(y��ng)��
- ...�����¿�˹�y�u(p��ng)ijƷ�����ܲ����������C(j��)����ƪ
- ...���������ʽ�ضșz�y���y��ϵ�y(t��ng)�Є�(l��)�����ʧ���Ӱ�(�m(x��))
- ...���������ʽ�ضșz�y���y��ϵ�y(t��ng)�Є�(l��)�����ʧ���Ӱ�
- ...��RTD�y��ϵ�y(t��ng)�Є�(l��)�����ʧ���Ӱ�
- ...���{(l��n)��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^(q��)�e
- ...��IoT�W(w��ng)�P(gu��n)ƽ�_(t��i)�c��(y��ng)��
- ...������(qi��ng)��ARM DesignStart��ͨ���ƻ�SoC���^�졢�^���L(f��ng)�U(xi��n)֮·
- ...����(sh��)�w�����D(zhu��n)��O2O���}��(ch��)���������ܻ�ˮƽ�ĺ�������
- ...���N܇��LED�(q��)��(d��ng)�����ı��^
- ...���{(l��n)���䌦�ڶ�ƪ��������ɷ���
- ...��������A�Ƴ��I(l��ng)�ȵğo����(sh��)��(j��)�ɼ���Q����
- ...����ɭ���댧(d��o)�w����Ј�څ�ݵğo����늷���
- ...����ɭ���댧(d��o)�w�����܇�����O(sh��)Ӌ(j��)څ�ݵĽ�Q����



- ...�� ��о��(chu��ng)�����ø�Уδ����܇�˙C(j��)�����O(sh��)Ӌ(j��)��ِ��(b��o)����ʽ����(d��ng)
- ...�� ̽�صڶ����l(w��i)�{(l��n)ɽ������(chu��ng)�¡�������ԇ�(y��n)���g(sh��)Փ����
- ...�� ��2018�Ї��댧(d��o)�w���B(t��i)朴��(hu��)���ڽ��Kʡ�����e��
- ...�� �����}��Ҏ(gu��)����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�(chu��ng)������ܵ�����
- ...�� �ⷨ�댧(d��o)�w��ST����Cinemo��Valens��CES 2018չ��(li��n)����ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a(ch��n)�I(y��)��(chu��ng)�°l(f��)չ�߷�Փ�������ھ����_
- ...�� ����늙C(j��)��(qi��ng)�ݳ���PCIM����2017չ
- ...�� GPGPU���a(ch��n)������Ї�оƬ�a(ch��n)�I(y��)�Ŀհ؎�
- ...�� ��(li��n)�W(w��ng)�a(ch��n)Ʒ�O(sh��)Ӌ(j��)��Wi-Fi�B�ӵ��Ă�(g��)�P(gu��n)�I����
- ...�� �������Ї�MEMS���܂������a(ch��n)�I(y��)�l(f��)չ���(hu��)�����ڰ������_�Ļ
- ...�� IAIC���(xi��ng)ِ���[���Ї�о����(y��ng)�Ä�(chu��ng)�£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �yԇ���g(sh��)
- ...�� ����(g��)�Ј��������L�Ƅ�(d��ng)Molex�ӏ�(qi��ng)��܇�I(l��ng)��İl(f��)չ
- ...�� �Ї��Gɫ����(li��n)�˳������(hu��)���_�ڼ� ���a(ch��n)�W(xu��)���ù�̽�Gɫ�l(f��)չ��ģʽ
- ...�� Efinix® ȫ���(q��)��(d��ng)AI߅��Ӌ(j��)�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r(sh��)���a(ch��n)Ʒ�U(ku��)չ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M(j��n)����(hu��)�����I(l��ng)�ǻ�������
- ...�� ��늮a(ch��n)Ʒ�_�l(f��)���yԇ��ӑ��(hu��)��������Դ�����ɹ��e��
- ...�� Manz���ǿƼ�����댧(d��o)�w�I(l��ng)�� ����弉(j��)�ȳ��ͷ��b�ṩ���W(xu��)���Ƴ̡�Ϳ�������⑪(y��ng)�õ����a(ch��n)�O(sh��)���Q����
- ...�� ������ABITRODE��(d��ng)��늳yԇϵ�y(t��ng)���������������Դ
- ...�� ������AFTFϵ��늳yԇϵ�y(t��ng)�И�(bi��o)��������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ(f��)�dϵ�y(t��ng)�ɹ����������؈
- ...�� ������A���H��늄�(d��ng)��܇���P(gu��n)�I�����y�u(p��ng)��ӑ��(hu��)�����[���M(j��n)�y�u(p��ng)���g(sh��)




- ...�� ��(sh��)��(j��)�ɼ��K��ϵ�y(t��ng)�O(sh��)��
- ...�� ���x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|(zh��)�J(r��n)�C����܇ϵ�Юa(ch��n)ƷӋ(j��)��
- ...�� ���`˼® �����U(ku��)������� ⁽�ϵ��™ FPGA �a(ch��n)Ʒ ⁽�ϵ�Юa(ch��n)Ʒ�U(ku��)�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_(t��i)�e� (TSMC) 16�{��ˇ��(ji��)�c(di��n)��Ƭ
- ...�� TI��2019��ȫ����W(xu��)������O(sh��)Ӌ(j��)��ِ�C��(ji��ng)��Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C(j��)�@��ȫ���ׂ�(g��)��܇��ȫ�����Եȼ�(j��)(ASIL) ��D���J(r��n)�C
- ...�� ���R��܇�x��BlackBerry������һ����܇