
ST集成傳感器方案實(shí)現(xiàn)電子羅盤功能
意法半導(dǎo)體 涂仲軒(Travis Tu) 魏鳴(William Wei)
Abstract
As E-Compass is popular in smart phones, this article presents the sensor module LSM303DLH from STMicroelectronics which can achieve E-Compass function with high performance but low cost. The sensor module combines tri-axis accelerometer and tri-axis magnetometer in one package, user can get sensor data easily with I2C bus. Besides the working principle and parameters of the module are introduced, the article also provides ST E-Compass solution based on the sensor module both from hardware side and software side.
電子羅盤是一種重要的導(dǎo)航工具,能實(shí)時(shí)提供移動(dòng)物體的航向和姿態(tài)。隨著半導(dǎo)體工藝的進(jìn)步和手機(jī)操作系統(tǒng)的發(fā)展,集成了越來越多傳感器的智能手機(jī)變得功能強(qiáng)大,很多手機(jī)上都實(shí)現(xiàn)了電子羅盤的功能。而基于電子羅盤的應(yīng)用(如Android的Skymap)在各個(gè)軟件平臺(tái)上也流行起來。
要實(shí)現(xiàn)電子羅盤功能,需要一個(gè)檢測磁場的三軸磁力傳感器和一個(gè)三軸加速度傳感器。隨著微機(jī)械工藝的成熟,意法半導(dǎo)體推出將三軸磁力計(jì)和三軸加速計(jì)集成在一個(gè)封裝里的二合一傳感器模塊LSM303DLH,方便用戶在短時(shí)間內(nèi)設(shè)計(jì)出成本低、性能高的電子羅盤。本文以LSM303DLH為例討論該器件的工作原理、技術(shù)參數(shù)和電子羅盤的實(shí)現(xiàn)方法。
1. 地磁場和航向角的背景知識(shí)
如圖1所示,地球的磁場象一個(gè)條形磁體一樣由磁南極指向磁北極。在磁極點(diǎn)處磁場和當(dāng)?shù)氐乃矫娲怪保诔嗟来艌龊彤?dāng)?shù)氐乃矫嫫叫校栽诒卑肭虼艌龇较騼A斜指向地面。用來衡量磁感應(yīng)強(qiáng)度大小的單位是Tesla或者Gauss(1Tesla=10000Gauss)。隨著地理位置的不同,通常地磁場的強(qiáng)度是0.4-0.6 Gauss。需要注意的是,磁北極和地理上的北極并不重合,通常他們之間有11度左右的夾角。
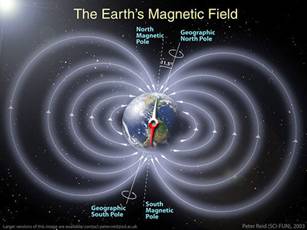
圖1 地磁場分布圖
地磁場是一個(gè)矢量,對于一個(gè)固定的地點(diǎn)來說,這個(gè)矢量可以被分解為兩個(gè)與當(dāng)?shù)厮矫嫫叫械姆至亢鸵粋€(gè)與當(dāng)?shù)厮矫娲怪钡姆至俊H绻3蛛娮恿_盤和當(dāng)?shù)氐乃矫嫫叫校敲戳_盤中磁力計(jì)的三個(gè)軸就和這三個(gè)分量對應(yīng)起來,如圖2所示。
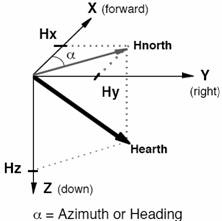
圖2 地磁場矢量分解示意圖
實(shí)際上對水平方向的兩個(gè)分量來說,他們的矢量和總是指向磁北的。羅盤中的航向角(Azimuth)就是當(dāng)前方向和磁北的夾角。由于羅盤保持水平,只需要用磁力計(jì)水平方向兩軸(通常為X軸和Y軸)的檢測數(shù)據(jù)就可以用式1計(jì)算出航向角。當(dāng)羅盤水平旋轉(zhuǎn)的時(shí)候,航向角在0º- 360º之間變化。
式1
2.ST集成磁力計(jì)和加速計(jì)的傳感器模塊LSM303DLH
2.1 磁力計(jì)工作原理
在LSM303DLH中磁力計(jì)采用各向異性磁致電阻(Anisotropic Magneto-Resistance)材料來檢測空間中磁感應(yīng)強(qiáng)度的大小。這種具有晶體結(jié)構(gòu)的合金材料對外界的磁場很敏感,磁場的強(qiáng)弱變化會(huì)導(dǎo)致AMR自身電阻值發(fā)生變化。
在制造過程中,將一個(gè)強(qiáng)磁場加在AMR上使其在某一方向上磁化,建立起一個(gè)主磁域,與主磁域垂直的軸被稱為該AMR的敏感軸,如圖3所示。為了使測量結(jié)果以線性的方式變化,AMR材料上的金屬導(dǎo)線呈45º角傾斜排列,電流從這些導(dǎo)線上流過,如圖4所示。由初始的強(qiáng)磁場在AMR材料上建立起來的主磁域和電流的方向有45º的夾角。
圖3 AMR材料示意圖
圖4 45º角排列的導(dǎo)線
當(dāng)有外界磁場Ha時(shí),AMR上主磁域方向就會(huì)發(fā)生變化而不再是初始的方向了,那么磁場方向和電流的夾角θ也會(huì)發(fā)生變化,如圖5所示。對于AMR材料來說,θ角的變化會(huì)引起AMR自身阻值的變化,并且呈線性關(guān)系,如圖6所示。

圖5 磁場方向和電流方向的夾角
圖6 θ-R特性曲線
ST利用惠斯通電橋檢測AMR阻值的變化,如圖7所示。R1/R2/R3/R4是初始狀態(tài)相同的AMR電阻,但是R1/R2和R3/R4具有相反的磁化特性。當(dāng)檢測到外界磁場的時(shí)候,R1/R2阻值增加∆R而R3/R4減少∆R。這樣在沒有外界磁場的情況下,電橋的輸出為零;而在有外界磁場時(shí)電橋的輸出為一個(gè)微小的電壓∆V。
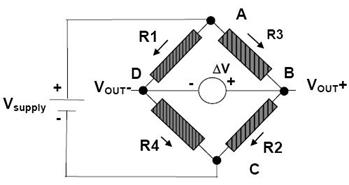
圖7 惠斯通電橋
當(dāng)R1=R2=R3=R4=R,在外界磁場的作用下電阻變化為∆R時(shí),電橋輸出∆V正比于∆R。這就是磁力計(jì)的工作原理。
2.2 置位/復(fù)位(Set/Reset)電路
由于受到外界環(huán)境的影響,LSM303DLH中AMR上的主磁域方向不會(huì)永久保持不變。LSM303DLH內(nèi)置有置位/復(fù)位電路,通過內(nèi)部的金屬線圈周期性的產(chǎn)生電流脈沖,恢復(fù)初始的主磁域,如圖8所示。需要注意的是,置位脈沖和復(fù)位脈沖產(chǎn)生的效果是一樣的,只是方向不同而已。
圖8 LSM303DLH置位/復(fù)位電路
置位/復(fù)位電路給LSM303DLH帶來很多優(yōu)點(diǎn):
1) 即使遇到外界強(qiáng)磁場的干擾,在干擾消失后LSM303DLH也能恢復(fù)正常工作而不需要用戶再次進(jìn)行校正。
2) 即使長時(shí)間工作也能保持初始磁化方向?qū)崿F(xiàn)精確測量,不會(huì)因?yàn)樾酒瑴囟茸兓騼?nèi)部噪音增大而影響測量精度。
3) 消除由于溫漂引起的電橋偏差。
2.3 LSM303DLH的性能參數(shù)
LSM303DLH集成三軸磁力計(jì)和三軸加速計(jì),采用數(shù)字接口。磁力計(jì)的測量范圍從1.3 Gauss到8.1 Gauss共分7檔,用戶可以自由選擇。并且在20 Gauss以內(nèi)的磁場環(huán)境下都能夠保持一致的測量效果和相同的敏感度。它的分辨率可以達(dá)到8 mGauss并且內(nèi)部采用12位ADC,以保證對磁場強(qiáng)度的精確測量。和采用霍爾效應(yīng)原理的磁力計(jì)相比,LSM303DLH的功耗低,精度高,線性度好,并且不需要溫度補(bǔ)償。
LSM303DLH具有自動(dòng)檢測功能。當(dāng)控制寄存器A被置位時(shí),芯片內(nèi)部的自測電路會(huì)產(chǎn)生一個(gè)約為地磁場大小的激勵(lì)信號并輸出。用戶可以通過輸出數(shù)據(jù)來判斷芯片是否正常工作。
作為高集成度的傳感器模組,除了磁力計(jì)以外LSM303DLH還集成一顆高性能的加速計(jì)。加速計(jì)同樣采用12位ADC,可以達(dá)到1mg的測量精度。加速計(jì)可運(yùn)行于低功耗模式,并有睡眠/喚醒功能,可大大降低功耗。同時(shí),加速計(jì)還集成了6軸方向檢測,兩路可編程中斷接口。
3. ST電子羅盤方案介紹
一個(gè)傳統(tǒng)的電子羅盤系統(tǒng)至少需要一個(gè)三軸的磁力計(jì)以測量磁場數(shù)據(jù),一個(gè)三軸加速計(jì)以測量羅盤傾角,通過信號條理和數(shù)據(jù)采集部分將三維空間中的重力分布和磁場數(shù)據(jù)傳送給處理器。處理器通過磁場數(shù)據(jù)計(jì)算出方位角,通過重力數(shù)據(jù)進(jìn)行傾斜補(bǔ)償。這樣處理后輸出的方位角不受電子羅盤空間姿態(tài)的影響,如圖9所示。
圖9 電子羅盤結(jié)構(gòu)示意圖
LSM303DLH將上述的加速計(jì)、磁力計(jì)、A/D轉(zhuǎn)化器及信號條理電路集成在一起,仍然通過I2C總線和處理器通信。這樣只用一顆芯片就實(shí)現(xiàn)了6軸的數(shù)據(jù)檢測和輸出,降低了客戶的設(shè)計(jì)難度,減小了PCB板的占用面積,降低了器件成本。
LSM303DLH的典型應(yīng)用如圖10所示。它需要的周邊器件很少,連接也很簡單,磁力計(jì)和加速計(jì)各自有一條I2C總線和處理器通信。如果客戶的I/O接口電平為1.8V,Vdd_dig_M、Vdd_IO_A和Vdd_I2C_Bus均可接1.8V供電,Vdd使用2.5V以上供電即可;如果客戶接口電平為2.6V,除了Vdd_dig_M要求1.8V以外,其他皆可以用2.6V。在上文中提到,LSM303DLH需要置位/復(fù)位電路以維持AMR的主磁域。C1和C2為置位/復(fù)位電路的外部匹配電容,由于對置位脈沖和復(fù)位脈沖有一定的要求,建議用戶不要隨意修改C1和C2的大小。
對于便攜式設(shè)備而言,器件的功耗非常重要,直接影響其待機(jī)的時(shí)間。LSM303DLH可以分別對磁力計(jì)和加速計(jì)的供電模式進(jìn)行控制,使其進(jìn)入睡眠或低功耗模式。并且用戶可自行調(diào)整磁力計(jì)和加速計(jì)的數(shù)據(jù)更新頻率,以調(diào)整功耗水平。在磁力計(jì)數(shù)據(jù)更新頻率為7.5Hz、加速計(jì)數(shù)據(jù)更新頻率為50Hz時(shí),消耗電流典型值為0.83mA。在待機(jī)模式時(shí),消耗電流小于3uA。
圖10 LSM303DLH典型應(yīng)用電路圖
4. 鐵磁場干擾及校準(zhǔn)
電子指南針主要是通過感知地球磁場的存在來計(jì)算磁北極的方向。然而由于地球磁場在一般情況下只有微弱的0.5高斯,而一個(gè)普通的手機(jī)喇叭當(dāng)相距2厘米時(shí)仍會(huì)有大約4高斯的磁場,一個(gè)手機(jī)馬達(dá)在相距2厘米時(shí)會(huì)有大約6高斯的磁場,這一特點(diǎn)使得針對電子設(shè)備表面地球磁場的測量很容易受到電子設(shè)備本身的干擾
相關(guān)閱讀:

- ...·圖文詳解汽車儀表板背后的車規(guī)級安全設(shè)計(jì)要求
- ...·使用有安全保障的閃存存儲(chǔ)構(gòu)建安全的汽車系統(tǒng)
- ...·反向偏置差分線性傳感器的較新進(jìn)展和應(yīng)用
- ...·艾德克斯測評某品牌智能插座——待機(jī)功耗篇
- ...·三線電阻式溫度檢測器測量系統(tǒng)中勵(lì)磁電流失配的影響(續(xù))
- ...·三線電阻式溫度檢測器測量系統(tǒng)中勵(lì)磁電流失配的影響
- ...·RTD測量系統(tǒng)中勵(lì)磁電流失配的影響
- ...·藍(lán)牙BR/EDR 和 Bluetooth Smart的十大重要區(qū)別



- ...· “芯創(chuàng)杯”首屆高校未來汽車人機(jī)交互設(shè)計(jì)大賽報(bào)名正式啟動(dòng)
- ...· 探秘第二屆衛(wèi)藍(lán)山鷹“創(chuàng)新·共享”試驗(yàn)技術(shù)論壇!
- ...· “2018中國半導(dǎo)體生態(tài)鏈大會(huì)”在江蘇省盱眙舉行
- ...· 新主題新規(guī)劃,CITE 2019瞭望智慧未來
- ...· 從汽車到工廠,TI毫米波傳感器致力于創(chuàng)造更智能的世界
- ...· 意法半導(dǎo)體(ST)、Cinemo和Valens在CES 2018展上聯(lián)合演示汽車信息娛樂解決方案
- ...· 北京集成電路產(chǎn)業(yè)創(chuàng)新發(fā)展高峰論壇即將在京召開
- ...· 三菱電機(jī)強(qiáng)勢出擊PCIM亞洲2017展
- ...· GPGPU國產(chǎn)替代:中國芯片產(chǎn)業(yè)的空白地帶
- ...· 物聯(lián)網(wǎng)產(chǎn)品設(shè)計(jì)中Wi-Fi連接的四個(gè)關(guān)鍵因素
- ...· 第三屆中國MEMS智能傳感器產(chǎn)業(yè)發(fā)展大會(huì)即將于蚌埠拉開帷幕
- ...· IAIC專項(xiàng)賽演繹“中國芯“應(yīng)用創(chuàng)新,信息安全高峰論壇亮劍海寧
- ...· 智能控制有源鉗位反激
- ...· 解讀5G毫米波OTA 測試技術(shù)
- ...· 多個(gè)市場高速增長推動(dòng)Molex加強(qiáng)汽車領(lǐng)域的發(fā)展
- ...· 中國綠色制造聯(lián)盟成立大會(huì)召開在即 政產(chǎn)學(xué)研用共探綠色發(fā)展新模式
- ...· Efinix® 全力驅(qū)動(dòng)AI邊緣計(jì)算,成功推出Trion™ T20 FPGA樣品, 同時(shí)將產(chǎn)品擴(kuò)展到二十萬邏輯單元的T200 FPGA
- ...· 英飛凌亮相進(jìn)博會(huì),引領(lǐng)智慧新生活
- ...· 三電產(chǎn)品開發(fā)及測試研討會(huì)北汽新能源專場成功舉行
- ...· Manz亞智科技跨入半導(dǎo)體領(lǐng)域 為面板級扇出型封裝提供化學(xué)濕制程、涂布及激光應(yīng)用等生產(chǎn)設(shè)備解決方案
- ...· 中電瑞華BITRODE動(dòng)力電池測試系統(tǒng)順利交付北汽新能源
- ...· 中電瑞華FTF系列電池測試系統(tǒng)中標(biāo)北京新能源汽車股份有限公司
- ...· 中電瑞華大功率高壓能源反饋式負(fù)載系統(tǒng)成功交付中電熊貓
- ...· 中電瑞華國際在電動(dòng)汽車及關(guān)鍵部件測評研討會(huì)上演繹先進(jìn)測評技術(shù)




- ...· 數(shù)據(jù)采集終端系統(tǒng)設(shè)備
- ...· 簡儀科技踏上新征程
- ...· 易靈思® 宣布 AEC-Q100 資質(zhì)認(rèn)證和汽車系列產(chǎn)品計(jì)劃
- ...· 易靈思® 宣布擴(kuò)充高性能 鈦金系列™ FPGA 產(chǎn)品 鈦金系列產(chǎn)品擴(kuò)充至包含 1M 邏輯單元的 FPGA
- ...· 易靈思® 宣布Trion® Titanium 在臺(tái)積電 (TSMC) 16納米工藝節(jié)點(diǎn)流片
- ...· TI杯2019年全國大學(xué)生電子設(shè)計(jì)競賽頒獎(jiǎng)典禮在京舉行
- ...· BlackBerry QNX虛擬機(jī)獲得全球首個(gè)汽車安全完整性等級(ASIL) ‘D’認(rèn)證
- ...· 威馬汽車選擇BlackBerry助力下一代汽車