
����LabVIEW��PXIƽ�_��6-DOF���C���˿���ϵ�y���_�l
Study on the Control System of the 6-DOF Parallel Robot Based on LabVIEW and PXI Development Platform
���ߣ�������
ָ���ώ����߷� �w�F��
�Ϻ���ͨ��W�Cе�c�������̌WԺ
�����I�C�����\�ӿ���
�������ó����NIϵ�ЮaƷ���٘���һ�������ơ����܃�Խ���˙C�����Ѻõ��_��ʽ�����ɶȲ��C���˔���ϵ�y�����H���ЌW�g���x�����Ќ��H���x��
���÷�����
��6-PPPS�����ɶȲ��C���˞錦����PXI-1042��ǶPXI-8186����������ģ�����PXI-7356���S�\�ӿ��ƿ���UMI-7774�ӿڰ���6���ŷ�늙C�����ö��S���ƿ�������ܛ����LabVIEW 8.0���F늙C��ȫͬ�������C���˵Ķ��S�f�{܉�E���ơ�܉�E�����x���c�@ʾ���P�I���g������PXI-6511����ݔ�뿨���F�������o����Bָʾ���_�P�����ƣ�������PIDܛ������RTģ�K�ď����܌��F�����_�l��ܛ���_�l�ϲ������Ñ��¼����g��֪ͨ����м��g��LabVIEW�ĸ����̼��g����Q�˸��Ñ������ģ�K֮�g�Č��r�ГQ�����N׃���đ��Ät���F��ͬģ�K֮�g����Ϣ���f������VI�ӑB�d�뼼�g�����F��VI�ļ��{���úͶ����ĄӑB�d�뼰�������ã��������LabVIEW������ⲿ�ӿ�
���������F�˄ӑB朽ӎ죨DLL����Windows API���{�ã���Ƕ����Matlab���C�����\�ӌWģ�ͣ�ʹ�������Џ���Ĺ��ܣ�Ҳʹ�Ï��s��Ӌ������ݡ�
ʹ�õĮaƷ��
- PXI-1042 �C�䡢
- PXI-8186 ��������
- PXI-7356 �\�ӿ��ƿ���
- UMI-7774 ͨ���\�ӿ��ƽӿڡ�
- PXI-6511 ���I����I/0����
- LabVIEW 8.0��
- LabVIEW RT(���rģ�K)��
- Control Design and Simulation Bundle
- Labview Control Design Toolkit
- Labview System Identification Toolkit
- Labview Simulation Interface
- Toolkit
- Labview Simulation Module
- Motion Assistant
��B��
���C�������䄂�ȴ��d���������`��С�����ȸߡ�����ؓ�ɱ�С���������ܺõȃ��c�����H�H�Ǯ�ǰ�C�����о��I��ğ��c����������u�߳�����ұ����I�����J�ɡ����������١��ʴ_���_��ʽ���ֿ���ϵ�y���Ƽs���C���˰l
չ��ƿ�i֮һ�����Ќ��r���^���Ķ��S�\�ӿ��ƿ��������Ƶ�ܛ���_�lƽ�_���似�g�P�I������NI��˾��һϵ��ܛӲ���aƷ���H�܉F�C���˵ľ��_���S�\�ӿ��ƣ����ҹ��s���_�l���ڡ�������ϵ�y�ɱ������ھS�o�������e��̓�M�x�����g�đ��ã�ʹ��ϵ�y�܉���һ���dz��Ѻõ��˙C�������档�@Щ���c������ɶȲ��C���������Ј��ṩ�˱��C��
�������У���LabVIEW��ܛ��ƽ�_����Ƕ����S�\�ӿ��ƿ���PXI-7356����PXI�_�lƽ�_��Ӳ�����A��������ø��Nܛ��ģ�K���߰��������_�l�˝M�����S�\�ӵ�6-DOF��Degree of Freedom�����C���˿���ϵ�y���ڱ�����ϵ�y���_�l�������^���Ќ��F�˶�늙Cͬ�������S�f�{܉�E���ơ�܉�E�������r�@ʾ�c�x�����ĄӑB�d���c�ؘ�����Ϣ���{���c�����ȹ��ܡ����Y���C��������NI��˾ϵ�ЮaƷ���H�܉���ٵ��_�l�����C���˵Ŀ���ϵ�y�����ϵ�y���ԃr�ȣ������ܵõ����^������ϵ�y���ԣ��磺25KHz��25.6MHz�ľ��a��������̖�V������ʹ��ϵ�y�܉��ڏ�늸ɔ_�Ĺ��I�F���ķ���������6�SPID�������ڿ����_��250��sʹ�Ì��r���h�h����һ����ƿ���ϵ�y1ms��Ҫ�C�������S�f�{�\�Ӻ��ĩ�ˈ��������B�`����_1��m�w�F��ϵ�y���_�����ԡ�
�������
���C��������Խ�����������߳�����ң����빤�I����˂��^����Ϥ���ճ������С�����1962��Gough and Whitehall�ͰѲ��C��������݆̥�z�y�C���^����ʮ���У����C���˱������w����ģ�M���������C���ˡ����g�C�����Լ�����������h�R�е������e�����e��Ȼ��������C���˴������_�l�����L��ϵ�y���_�žS�o���������y����r�߰��Լ�ϵ�y���Բ����Ƶ�ȱ�c���@Ҳ���Ƽs���C����ȫ�������Ј���ƿ�i��������^�̵ĕr�g���_�l��ϵ�y���Ժá��ɱ��͡������Rȫ�������ѺõĶ����ɶȲ��C���˿���ϵ�y��һ������ԵĹ�����
������6-PPPS���C���˞���ƌ�����NI��˾��ϵ��ܛӲ���aƷ����A�����Ї�����Ȼ����No. 30770538����֧�֣������_�l�˴˲��C���˵��_��ʽ���ֿ���ϵ�y��
ϵ�y���w���OӋ
���n�}���о��IJ��C���˵����������߾��ȵ��ŷ�늙C���������Г���ÿһ�S�϶��O��ǰ��λ������λ��ԭ�c�����_�P����18��I/O����늙C����Ҫ�M����λ�÷������A��܉�EҎ����ʹ�C���˵�ĩ�ˈ�������һ����܉�E�ʴ_���_�A��λ�ã��������A��Ҏ����܉�E�M�й�������ˣ����C���˵�܉�EҎ���ͷ����\����Ҫһ���������Ӌ�����M��Ӌ��ʹ惦�������@Щ�惦�Ĕ������r���͵�������λ�C�Ŀ��ƿ��������ϣ��Ԯa��������늙C�������늉������]��ϵ�y��Ҫ�����Ĕ������f�����_ͬ���Լ�I/O��̖�N�����c���҂������x����PXI�_�lƽ�_���@�����PXI���H���ИI���^�ߵĿ����������^�͵Ă�ݔ���t�������ṩ��DC��6.6 GHz RF�ĸ��Nģ�K����I/O�������m����ϵ�y�Mһ�������ͺ��mģ�K��Ƕ�룬�҂��x���˸����ܵ�8�ۙC�䡣�������t���Ã�Ƕ2.2GHz Intel ���v4̎������PXI-8186�ԝM��C����܉�EҎ������͔��������Ŀ����ԡ�PXI-6511���I����I/O�ӿڰ��������ģ�K�ṩ���_64·�ĸ��x����ݔ�롣���ڙC���˿���ϵ�y��ܛӲ�����w�OӋ���x�ͣ��҂����քe��������һ��B������ϵ�yӲ��֮�g���Pϵ��D1.
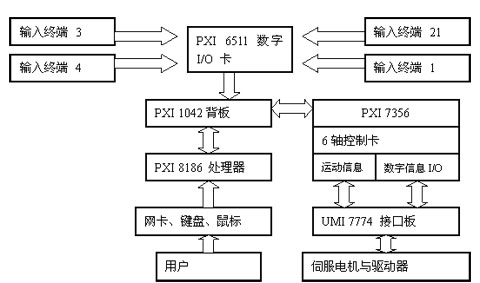
�D1.6-DOF���C���˿���ϵ�y�ĸ�����֮�g���Pϵ
����ϵ�yӲ���OӋ
���ڱ����C��������Ⱦɫ�w�и��b��ϵ�y�ĺ����ϵ�y����ؓ����Ⱦɫ�w�^�K�и�����Ľ^���΄գ����иߵĶ�λ���Ⱥʹ�Ĺ������gҪ��������C����һ6-PPPS����Ŀ��g�����ɶȲ��C�����������߾����ŷ�늙C�ӌ��F���g���S�\�ӣ�X��Y��Z����������ƄӺ��@X��Y��Z����������D�ӣ������ĩ��ƽ�_Ҫ�_�������Ⱥ�����늙C�ąf�{���ƣ������҂��x����NI��˾����Խ��PXI-7356���S�\�ӿ��ƿ����˶��S�\�ӿ��ƿ��ľ�����c���g��Ч������˷e���ٶȣ�����һ���λ�Ô��c�܉���2kHz������Ӌ���|�l�c�����ڵȾ�ֲ��c�t�܉��Ը��_4MHz������Ӌ�㣻�˿��ă��SPID�������ڿ����_��62.5��s,8�SPID�������ڿ����_��250��s�����r���h�h����һ��ԇ����1ms��Ҫ����˸ߵ�Ӌ��Ч���m���˱�ϵ�y�Ŀ���푑������ԡ�PXI-7356���S�\�ӿ��ƿ��Ķ��Sͬ���r�gС��һ���ɘ����ڣ���λ�þ����^�ߣ�λ�÷����rλ���`����^��ؓһ�������a�PӋ����quadrature count����ģ�M�������r��������õ�8·16λģ�M��ݔ��ɼ����ܣ��O��������ģ���D�Q�ķֱ��ʣ�ʹ��λ���`����^һ���^����Чλ(LSB)����˸ߵľ��Ȟ�ϵ�y�߾��ȵ�Ҫ���ṩ�˺ܺõı��ϡ����⣬PXI-7356���S�\�ӿ��ƿ������İ�ȫ�˜ʡ�S�����{�����ܡ��pPID���ƭh�Լ����S֮�g������X݆����܉��ϵ�y�ṩ�ɿ��ķ����ԡ�PXI-7356���S�\�ӿ��ƿ����������\�ӿ��ƽӿ�UMI-7774�˿ڰ�����Á����ƹ̑B�^������xȡ���־�/�g�a����64λ����I/O��ʹ��ϵ�y���T��18·��λ��12·ʹ�ܼ�����Ĉ���̖�xȡ��ݔ�����鷽���ݡ��b�����Ͽ��]���҂��J��NI��˾��PXI-7356���S�\�ӿ��ƿ���������ģ�Kʽ�m�ϱ�ϵ�y��Ҫ���x�á�
����ϵ�yܛ���OӋ
����ϵ�y�ď��s��ʹ��ܛ���OӋ���^���б���M�к�����Ч�Č����ģ�K���֡��Y�Ͽ���ϵ�yӲ������Ҫ�ʬF�Ĺ��ܣ���ܛ�����֞鑪��ܛ���ӡ�����ܛ���Ӻ���ܛ���ӣ�ÿ�Ӹ�������Ҫ���ַ֞����ɹ���ģ�K����D2.
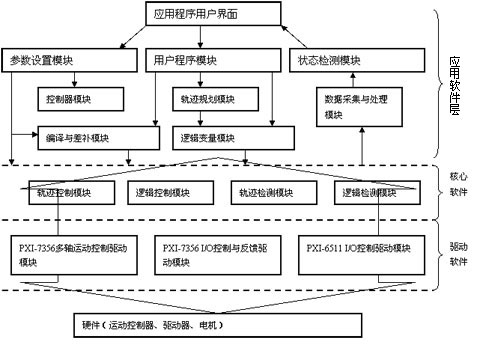
�D2. ܛ���Y���c��Ϣ���f
����ܛ���ӣ����]��ϵ�y�����^������Ҫ�\��һЩ�_�P������늙C���l��һЩ�ӿځ���׃��늙C����մɵ��\�Ѕ�����һЩָʾ����l�����������̖��һЩ܉�E�����팍�r�O�ظ����ֵ��\����r�Լ�������֮�g���ГQ�ȹ��ܣ��҂��x�����^���w�F̓�M�x�����g�rֵ��LabVIEW�D�λ������Z�ԣ��������Ѻá����㡢�`����˙C���档��������w��������/�ĽY���ľ��̷�ʽ����Ҫ�Ǟ��˽�Q������ͬ�l�ʵ�ѭ�h��ѭ�h֮�g����Ϣ������������Ƕ���˲��C���˵ķ���ģ�ͼ������㷨������ȫ��׃�����ֲ�׃��������׃���Ȍ��F������ģ�K֮�g��ģ�K�Ȳ�����Ϣ��������������Ñ��¼����g��֪ͨ����м��g���F������֮�g���ГQ�����˱����T��ɂ�ѭ�hͬ�r����һ������֮ĸ������}��������ͬ�����g����������^����Ҫ��ӳ����Ϣ�࣬����ڳ���Ĺ����ϣ��҂�Ҳ���������LabVIEW�ĸ����̼��ɣ�����˹�ʡ�ȴ�������������ܼ�ǰ��壬�҂������˄ӑBVI���Ƽ��g���������F����VI�ļ��ü��{�����Ҍ��F�˶��������OӋ�ĄӑB�d��ͽ������á�
����ܛ���ӣ�����C���˵�܉�E�����cI/O߉���Ƶij��ϣ�������c���B�m�\�С����S�{����܉�E�����x��ϵ�y�ԙz�ȡ�ԓ��ܛ��һ����ؓ؟��əC���˸��P����늙C�ľ��_ͬ���\�ӿ��ƣ����Fĩ�ˈ������ڲ������g�еľ��_܉�E����һ���棬ԓ��ܛ��߀��Ҫ���һ�Mͨ��I/O��ݔ��ݔ�����ƣ����F���C���\�ӵ��^�̿����Լ�������O��ąf�{���Ƶȣ����m�����s�Ŀ����΄���Ҫ��
��ܛ���ӣ���ܛ���nj��F���S�c���S�\�ӿ��ơ�D/A�D�Q��Ӳ��I/O���Ƶĺ������ϣ������S��
���P��x:
- ...2015/01/29 14:35�����ڣ̣��֣ɣţ� ����������ϵ�y���о�
- ...2013/12/03 14:27������LK����ˮ̎��SPLCϵ�y
- ...2013/01/04 16:30�����ڣ̣��֣ɣţ� �ģˣףУ��������f�h����ͨ�ŵČ��F
- ...2012/08/28 14:37�������Д_���l�� ����LabVIEW��NI USRP�M�����l/ͨ��������о�
- ...2012/08/21 10:43������LabVIEW�_�l��Ӱ�@ʾϵ�y
- ...2012/05/17 09:44������LM PLC���Ƶ�̫����ԄӸ�ۙϵ�y
- ...���D��Ԕ����܇�x���屳���܇Ҏ����ȫ�OӋҪ��
- ...��ʹ���а�ȫ���ϵ��W��惦������ȫ����܇ϵ�y
- ...������ƫ�ò�־��Ԃ��������^���Mչ�͑���
- ...�����¿�˹�y�uijƷ�����ܲ����������C����ƪ
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�(�m)
- ...���������ʽ�ضșz�y���y��ϵ�y�Є�����ʧ���Ӱ�
- ...��RTD�y��ϵ�y�Є�����ʧ���Ӱ�
- ...���{��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^�e



- ...�� ��о�������ø�Уδ����܇�˙C�����OӋ��ِ������ʽ����
- ...�� ̽�صڶ����l�{ɽ�������¡�������ԇ�gՓ����
- ...�� ��2018�Ї��댧�w���B朴�����ڽ��Kʡ�����e��
- ...�� �����}��Ҏ����CITE 2019�t���ǻ�δ��
- ...�� ����܇�����S��TI���ײ������������ڄ�������ܵ�����
- ...�� �ⷨ�댧�w��ST����Cinemo��Valens��CES 2018չ������ʾ��܇��Ϣ�ʘ���Q����
- ...�� ���������·�a�I���°lչ�߷�Փ�������ھ����_
- ...�� ����늙C���ݳ���PCIM����2017չ
- ...�� GPGPU���a������Ї�оƬ�a�I�Ŀհ؎�
- ...�� ���W�aƷ�OӋ��Wi-Fi�B�ӵ��Ă��P�I����
- ...�� �������Ї�MEMS���܂������a�I�lչ��������ڰ������_�Ļ
- ...�� IAIC���ِ���[���Ї�о�����Ä��£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �yԇ���g
- ...�� �����Ј��������L�Ƅ�Molex�ӏ���܇�I��İlչ
- ...�� �Ї��Gɫ�����˳���������_�ڼ� ���a�W���ù�̽�Gɫ�lչ��ģʽ
- ...�� Efinix® ȫ����AI߅��Ӌ�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r���aƷ�Uչ����ʮ�f߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M���������I�ǻ�������
- ...�� ��늮aƷ�_�l���yԇ��ӑ����������Դ�����ɹ��e��
- ...�� Manz���ǿƼ�����댧�w�I�� ����弉�ȳ��ͷ��b�ṩ���W���Ƴ̡�Ϳ�������⑪�õ����a�O���Q����
- ...�� ������ABITRODE����늳yԇϵ�y���������������Դ
- ...�� ������AFTFϵ��늳yԇϵ�y�И˱�������Դ��܇�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ�dϵ�y�ɹ����������؈
- ...�� ������A���H��늄���܇���P�I�����y�u��ӑ�������[���M�y�u���g




- ...�� �����ɼ��K��ϵ�y�O��
- ...�� ���x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|�J�C����܇ϵ�ЮaƷӋ��
- ...�� ���`˼® �����U������� ⁽�ϵ��™ FPGA �aƷ ⁽�ϵ�ЮaƷ�U�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_�e� (TSMC) 16�{��ˇ���c��Ƭ
- ...�� TI��2019��ȫ����W������OӋ��ِ�C����Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C�@��ȫ���ׂ���܇��ȫ�����Եȼ�(ASIL) ��D���J�C
- ...�� ���R��܇�x��BlackBerry������һ����܇