帶CAN總線的汽車儀表總程
引言:隨著汽車制造業(yè)的蓬勃發(fā)展,其在我國(guó)制造業(yè)界的龍頭地位越來越明顯。為進(jìn)一步增加汽車生產(chǎn)的國(guó)產(chǎn)化程度,作為汽車核心技術(shù)的自主產(chǎn)權(quán)就迫切地提到我國(guó)汽車發(fā)展的戰(zhàn)略日程上來。 帶CAN總線的車載儀表系統(tǒng)就是基于這一理念,迎合當(dāng)今潮流,在眾多國(guó)內(nèi)汽車制造商的急切關(guān)注下,作為我國(guó)汽車業(yè)的一項(xiàng)科技含量高起點(diǎn)的自主技術(shù)知識(shí)產(chǎn)權(quán)的產(chǎn)品研發(fā)出來。該電子系統(tǒng)的特殊優(yōu)點(diǎn) 其一, 它將以前的模擬組合的各分離式儀表 數(shù)字化式的統(tǒng)一管理起來。在 提高了儀表的穩(wěn)定性、 精度,提高了儀表壽命的同時(shí) 大大地降低了制造成本;其二, 它在汽車儀表內(nèi)引入了CAN總線,將系統(tǒng)設(shè)計(jì)成 開放式,易嵌入式的結(jié)構(gòu),在減少了系統(tǒng)的線索, 提高了系統(tǒng)抗干擾性的同時(shí),大大地增加了系統(tǒng)內(nèi)的數(shù)據(jù)流量, 保正了車載儀表的實(shí)時(shí)性。 簡(jiǎn)化了儀表系統(tǒng)和汽車中央控制中心的接口。
已研發(fā)出來的該套電子儀表系統(tǒng),不緊填補(bǔ)了我國(guó)車載儀表無全數(shù)字化的空白,同時(shí)它也是一個(gè)有著廣泛的市場(chǎng)行情,可持續(xù)性發(fā)展的企業(yè)項(xiàng)目。
車載儀表系統(tǒng)要處理的參數(shù)和硬件工作原理框圖
一 車載儀表系統(tǒng)要處理和顯示的參數(shù)
該儀表系統(tǒng)是被安置在駕駛員和方向盤前,主要是向駕駛員集中提供行進(jìn)中的車輛的行駛狀況。
車輛的行駛狀況在此表述為一系列參數(shù)。 這其中一的些參數(shù)須以表針的形式實(shí)時(shí)的指示給駕駛員,另外的一些參數(shù)須以數(shù)字形式實(shí)時(shí)的顯示給駕駛員。
本儀表系統(tǒng)設(shè)計(jì)成一個(gè)總表盤。 總表盤上要以表針指示的主要參數(shù)有:1) 發(fā)動(dòng)機(jī)冷卻水的溫度、2)油箱中的油量、3)發(fā)動(dòng)機(jī)的轉(zhuǎn)速、 4) 汽車實(shí)時(shí)行使速度。
儀表盤上要以液晶顯示的參數(shù)有: 1) 發(fā)動(dòng)機(jī)的轉(zhuǎn)速、 2)汽車實(shí)時(shí)行使速度、 3)行車時(shí)間和車行總里程(此片 液晶片上所顯示的數(shù)據(jù)可以翻 頁(yè))。 電路較大可同時(shí)點(diǎn)亮16位液晶數(shù)碼管,此外 儀表盤上還要有各向車行方向指示燈、轉(zhuǎn)向燈、儀表盤背光顯示燈等。
該儀表系統(tǒng)的主要工作、任務(wù)是: 通過溫度傳感器將汽車發(fā)動(dòng)機(jī)冷卻水的溫度、 通過油浮子 或 磁浮開關(guān)傳感器將汽車油箱中的余油量、 通過高速、 低速 霍爾傳感器將汽車內(nèi)燃機(jī)的轉(zhuǎn)速和汽車的實(shí)時(shí)行使速度轉(zhuǎn)換為脈沖周期, 經(jīng)過CPU 的A/D轉(zhuǎn)換處理 和CCP的脈寬捕捉處理, 處理結(jié)果 用四個(gè)步進(jìn)電機(jī)帶動(dòng)四個(gè)表針,實(shí)時(shí)地指示給車駕駛員, 同時(shí) 發(fā)動(dòng)機(jī)轉(zhuǎn)速,車行駛速度,車行駛里程,三個(gè)參數(shù)還須以液晶數(shù)碼管,可數(shù)字式地顯示出來。此外汽車的門控制顯示燈,左右轉(zhuǎn)向, 前后行駛, 以及汽車的剎車燈, 當(dāng)環(huán)境光線暗下后 儀表盤須制動(dòng)開啟的背光燈等,都須以發(fā)光管的形式反應(yīng)到儀表盤上。此外系統(tǒng)還需每隔一段時(shí)間記錄并同時(shí)備份一次行車?yán)锍虜?shù)到串行存儲(chǔ)器中。
二 車載儀表系統(tǒng)硬件電路工作原理和原理圖
本系統(tǒng)中心選型的單片機(jī) 是美國(guó)MICROCHIP公司生產(chǎn)的工業(yè)級(jí)PIC18F458。可以說, PIC18F458是一款專為車載儀表系統(tǒng) 量身訂定做的單片機(jī)。 雖然CPU PIC18F458的外圍接口是8位的, 但內(nèi)核總線結(jié)構(gòu)確是16位的。準(zhǔn)確的說 PIC18F458是一款準(zhǔn)16位單片機(jī),即 它既具有8位單片機(jī)接口簡(jiǎn)單特點(diǎn) 同時(shí) 它又具備16位單片機(jī)的運(yùn)算能力。 該單片機(jī)指令系統(tǒng)采用流水指令, 且內(nèi)部集成了8位硬乘法器, 所以該款單片機(jī)運(yùn)算速度快, CPU強(qiáng)壯,彌補(bǔ)了低檔PIC系列單片機(jī)運(yùn)算能力不足的缺點(diǎn)。且I/O口的驅(qū)動(dòng)電流大于2mA, 可直接用于驅(qū)動(dòng)數(shù)碼管, CPU芯片帶載能力極強(qiáng)。另外該單片機(jī)還可進(jìn)行8路,十位精度的A/D轉(zhuǎn)換。該款單片機(jī)的程序和數(shù)據(jù)存儲(chǔ)結(jié)構(gòu)較一般的單片機(jī)有所不同, 其空間設(shè)計(jì)的都特別大, 總體來說,有4K的數(shù)據(jù)存儲(chǔ)器 和2M的程序存儲(chǔ)器空間, 內(nèi)存空間為哈福結(jié)構(gòu),數(shù)據(jù)空間和程序空間可獨(dú)立尋址。 就4K的數(shù)據(jù)存儲(chǔ)器管理而言,分為16個(gè)頁(yè)面,每頁(yè)面為256個(gè)字節(jié)。 2M的程序存儲(chǔ)器空間管理,類似于8088/8086,2M的程序存儲(chǔ)器空間管理,分為堆棧和物理地址二個(gè)部分(因篇幅,這里不展開敘說)。這款單片機(jī)內(nèi)存管理有很有特點(diǎn), 之所以這樣做,不單單是為了增加內(nèi)存空間,更為重要的是有利于嵌入式操作系統(tǒng)的移植。就這款單片機(jī)而言, 系統(tǒng)如采用目前較流行的商用嵌入式操作系統(tǒng)則無需外擴(kuò)存儲(chǔ)芯片。
該款單片機(jī)專為車載儀表設(shè)計(jì),它包含了一般16位單片機(jī)所含的內(nèi)核的同時(shí), 它的內(nèi)部還封裝了一個(gè)256字節(jié)的可用電擦除的串行存儲(chǔ)器。雖然該存儲(chǔ)器采用SOC封裝,和CPU內(nèi)核封裝在同一芯片內(nèi), 但接口仍采用I2C總線的方式。本儀表系統(tǒng)設(shè)計(jì),因需要,外擴(kuò)了一片F(xiàn)LASH串行存儲(chǔ)器24LC01,以記錄一些較重要的車輛信息。 用I2C總線的方式向24LC01寫數(shù)據(jù)的同時(shí)可以鏡象復(fù)制一份數(shù)據(jù)到該CPU芯 片內(nèi)的 串行存儲(chǔ)器中,這樣可以將重要的數(shù)據(jù)保二份,一份在CPU內(nèi),一份在CPU外。這樣既防止了重要數(shù)據(jù)丟失,也防止了車輛信息數(shù)據(jù)被人為做假。下面分五個(gè)子圖簡(jiǎn)介該車載儀表電子系統(tǒng)的工作原理和具體的實(shí)現(xiàn)電路。
1) CPU單片機(jī) PIC18F458應(yīng)用工作原理系統(tǒng)圖和接線圖
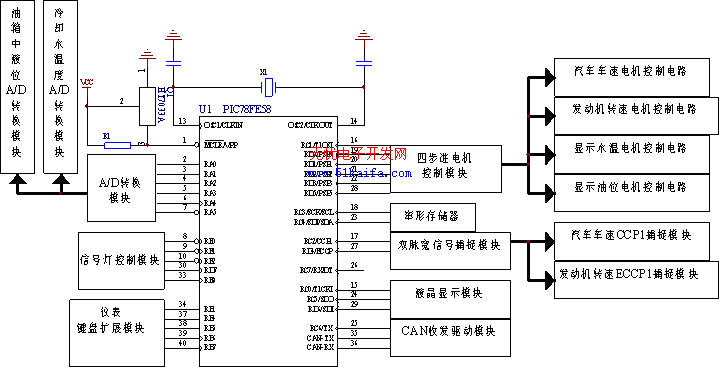
圖一CPU單片機(jī) PIC18F458應(yīng)用系統(tǒng)接線圖:
( 圖 一 )
注: CCP1為脈沖寬度捕捉器,ECCP1為增強(qiáng)型脈沖寬度捕捉器
圖一為CPU工作原理與系統(tǒng)電路圖, 該電路系統(tǒng)由單片機(jī)芯片 U1和七大電路模塊組成。本系統(tǒng)選用的單片機(jī)是PIC18F458, DIP封裝,四十個(gè)管腳。 從U1圖表的標(biāo)識(shí)中可以較直觀地、大至地看出U1芯片 各管腳的功能。七大模塊是: 一, 四個(gè)儀表步進(jìn)電機(jī)控制模塊、二,雙脈寬信號(hào)捕捉模塊、三,液晶顯示模塊、四,CAN收發(fā)驅(qū)動(dòng)模塊、五,儀表鍵盤擴(kuò)展模塊、六,信號(hào)指示燈控制模塊、七,A/D轉(zhuǎn)換控制模塊。系統(tǒng)還擴(kuò)展了一片24LC01B,F(xiàn)LASH串行存儲(chǔ)器,該串行存儲(chǔ)器通過I2C總線和CPU相連,用來記錄汽車的身份,行車總里程等。圖中 Q1是STO-23封裝的單片機(jī)的上電復(fù)模塊。
儀表步進(jìn)電機(jī)控制模塊用的是MOTOROALTER公司 專為驅(qū)動(dòng)儀表指針的步進(jìn)電機(jī)設(shè)計(jì)的專用芯片XI2027。該芯片帶載能力強(qiáng),可同時(shí)驅(qū)動(dòng)四個(gè)帶儀表指針的步進(jìn)電機(jī)。本系統(tǒng)用它驅(qū)動(dòng)顯示汽車車速的步進(jìn)電機(jī);顯示汽車發(fā)動(dòng)機(jī)轉(zhuǎn)速的步進(jìn)電機(jī);顯示汽車?yán)鋮s水溫的步進(jìn)電機(jī);顯示汽車車箱油位步進(jìn)電機(jī)。
兩路脈寬信號(hào)捕捉模塊是本電子系統(tǒng)的工作中心。汽車車速和汽車發(fā)動(dòng)機(jī)轉(zhuǎn)速是該儀表系統(tǒng)關(guān)于車況要重點(diǎn)顯示的參數(shù)。選擇PIC18F458為控制中心的原因之一是該單片機(jī)有二路脈寬信號(hào)捕捉器,一路為普通脈寬信號(hào)捕捉器 CCP1,另一路為增強(qiáng)型高速脈寬信號(hào)捕捉器 ECCP1,本系統(tǒng)正是很好的利用了PIC18F458單片機(jī)這一特點(diǎn),通過應(yīng)用霍爾傳感器,用CCP1測(cè)量轉(zhuǎn)動(dòng)較慢的汽車車速;用ECCP1測(cè)量轉(zhuǎn)動(dòng)較快的汽車發(fā)動(dòng)機(jī)轉(zhuǎn)速,將汽車車速、汽車發(fā)動(dòng)機(jī)轉(zhuǎn)速和步進(jìn)電機(jī)帶動(dòng)的儀表對(duì)應(yīng)顯示出來。
液晶顯示模塊用的是PHILIPS公司的HT1621B液晶驅(qū)動(dòng)芯片,該芯片可同時(shí)驅(qū)動(dòng)八個(gè)液晶數(shù)碼管。
系統(tǒng)較傳統(tǒng)儀表先進(jìn)的是引入CAN總線結(jié)構(gòu),選擇PIC18F458為控制中心的原因之二是該單片機(jī)內(nèi)部集成了CAN控制器。選擇PIC18F458,這抬高了電子儀表系統(tǒng)的技術(shù)含量的同時(shí)大大地節(jié)省了單片機(jī)外圍接口電路,單片機(jī)外圍只需擴(kuò)展CAN驅(qū)動(dòng)電路而無需復(fù)雜的控制電路。該電子系統(tǒng)可脫離CAN總線獨(dú)立工作。
選擇PIC18F458為控制中心的原因之三是該單片機(jī)有8個(gè)十位精度 A/D轉(zhuǎn)換接口。特別要提的是一路通過傳感器測(cè)量油箱中液位A/D轉(zhuǎn)換,另一路通過傳感器測(cè)量車?yán)鋮s水溫度 A/D轉(zhuǎn)換。此外還有光強(qiáng)等等。
為了節(jié)約單片機(jī) I/O 資源,系統(tǒng)鍵盤采用了譯碼的擴(kuò)展方式,擴(kuò)展了74LS148譯碼芯片。信號(hào)燈控制模塊用于驅(qū)動(dòng)各車行方向指示燈和背光燈的顯示控制等。
2)步進(jìn)電機(jī)的控制模塊工作原理和接線圖
本儀表盤上使用的電機(jī)是 SWATCH 公司生產(chǎn)的 M-S MOTOR。該電機(jī)設(shè)計(jì)精巧,結(jié)構(gòu)簡(jiǎn)單,價(jià)廉物美,可以應(yīng)用于各種儀表場(chǎng)合,是目前廣泛運(yùn)用的十字交叉線圈儀表電機(jī)的替代品。其結(jié)構(gòu) 可參閱SWATCH的說明書 。原理: 該電機(jī)的電動(dòng)轉(zhuǎn)子由二個(gè)平行的帶磁鐵心的線圈驅(qū)動(dòng),接口 電路圖上標(biāo)為Stepmotor,步進(jìn)電機(jī)接口。脈沖驅(qū)動(dòng)線圈帶動(dòng)電動(dòng)機(jī)轉(zhuǎn)子轉(zhuǎn)動(dòng),每經(jīng)過一脈沖序列的驅(qū)動(dòng),電動(dòng)機(jī)轉(zhuǎn)子可轉(zhuǎn) 600 ,總共傳動(dòng)速比為 1:180,也就是說,每經(jīng)過一脈沖序列,指針轉(zhuǎn)動(dòng) 1/30。M-S MOTOR步進(jìn)電機(jī)的線圈驅(qū)動(dòng)電流僅需 20mA,能耗低。
圖二 儀表系統(tǒng)電機(jī)驅(qū)動(dòng)接口電路圖:
( 圖 二 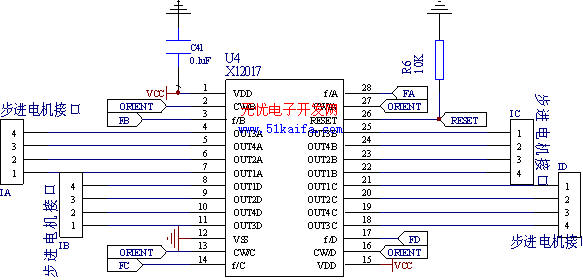 )
)
本儀表系統(tǒng)選用的電機(jī)驅(qū)動(dòng)模塊 如圖二。 芯片U4 X12027。U4 X12027 是MOTOROALTER公司 專為驅(qū)動(dòng)儀表指針的步進(jìn)電機(jī)設(shè)計(jì)的專用芯片。該芯片系列有四種,有驅(qū)動(dòng)單個(gè)電機(jī)的、驅(qū)動(dòng)二個(gè)電機(jī)的以及驅(qū)動(dòng)四個(gè)、八個(gè)電機(jī)的。 X12027可同時(shí)驅(qū)動(dòng)四個(gè)步進(jìn)電機(jī)。 該芯片的使用大大簡(jiǎn)化步進(jìn)電機(jī)和CPU的接口和控制電路。從圖上就看出,STEPMOTO是四個(gè)電機(jī)和芯片的接口1A、2A、3A、4A, 1B、2B、3B、4B, 1C、2C、3C、4C,1D、2D、3D、4D。 FA,FB,FC,FD可分別控制四個(gè)電機(jī)的轉(zhuǎn)動(dòng)方向;ORIENT控制的是各電機(jī)需轉(zhuǎn)動(dòng)步數(shù);RESET控制、清除和更新電機(jī)實(shí)時(shí),需轉(zhuǎn)動(dòng)的步數(shù)。
3)顯示模塊,鍵盤模塊工作原理和接線圖
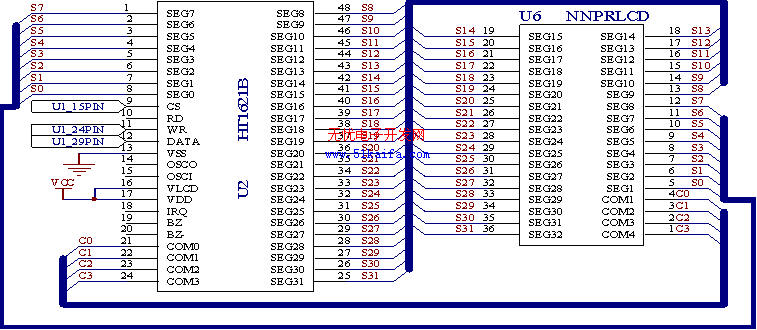
圖三 顯示模塊接線圖:
( 圖 三 )
本儀表系統(tǒng)選用的顯示模塊驅(qū)動(dòng)電路如圖 三所示。芯片U2 HT1621B是 PHILIPS公司專為液晶段 碼顯示器而設(shè)計(jì)的專用驅(qū)動(dòng)芯片, HT1621B 可驅(qū)動(dòng)16乘 8位液晶段 碼。芯片 U6 NNPRLCD是液晶顯示片,在 NNPRLCD液晶顯示片上可顯示16個(gè)8段碼。上電路圖所示的是 U2 HT1621B和U6 NNPRLCD連接方式 。圖中 CS為U2的 片 選 管腳,高電平有效; HT1621B通過SPI總線 和 CPU接口; 數(shù)據(jù)通過SPI總線下載到 HT1621B顯示緩沖區(qū)中,由HT1621B負(fù)責(zé)顯示和制動(dòng)刷新,不占用CPU的時(shí)間。WR為液晶顯示鎖存器的“寫” 控制端,低電平有效。
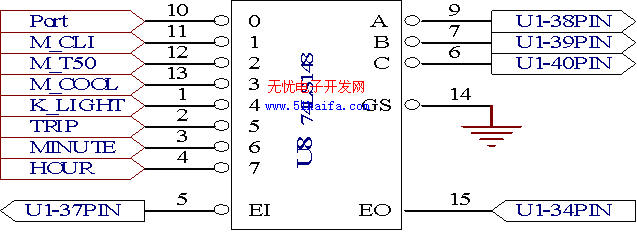
鍵盤電路,如圖四所示,由于CPU 系統(tǒng)資源I/O口不足,本儀表系統(tǒng)采用譯碼的方法對(duì)鍵盤電路進(jìn)行了擴(kuò)展。如圖四 U8 74LS148為8—3編碼芯片。系統(tǒng)仍采用軟件查循的方發(fā),給U8 的 15腳高電平,查循U8的5腳,如為低電平,鍵輸入有效,“讀” 鍵值。
圖四 鍵盤模塊接口線路圖圖:
( 圖 四 )
4)CAN通信模塊工作原理和接線圖
本系統(tǒng) 選型的單片機(jī), 是美國(guó)MICROCHIP公司生產(chǎn)的工業(yè)級(jí)PIC18F458, 除上述的 該CPU的 各優(yōu)點(diǎn)外, 本儀表系統(tǒng)選擇 PIC18F458單片機(jī)作為核心控制單元 另一個(gè)更為重要的原因是該單片機(jī)內(nèi)部集成了, 兼容BUSH1.0協(xié)議和BUSH2.0協(xié)議的CAN控制器。
作為一種技術(shù)先進(jìn),可靠性高,功能完善的中遠(yuǎn)程網(wǎng)絡(luò)控制方式, CAN-BUS已被廣泛地應(yīng)用于各自動(dòng)化控制系統(tǒng)中, 在汽車電子領(lǐng)域, CAN-BUS已作為一種標(biāo)致該汽車檔次的一個(gè)尺度,目前CAN-BUS已較廣泛地應(yīng)用于高檔轎車上。本車載儀表電子系統(tǒng), 以開放式的設(shè)計(jì)為指導(dǎo)思想,在兼容為一般車輛所應(yīng)用的同時(shí),首先倡導(dǎo)應(yīng)用CAN-BUS網(wǎng)絡(luò)控制系統(tǒng), 其優(yōu)點(diǎn)是 可大大減少了車載所用線索, 降低了汽車的故障率。
因 單片機(jī) PIC18F458內(nèi)部集成了CAN控制器,本儀表系統(tǒng)在CAN網(wǎng)絡(luò)控制電路方面僅外擴(kuò)了一片芯片U11A,CAN收發(fā)驅(qū)動(dòng)器TJA1050,硬件方面就完成了CAN-BUS的接口功能。節(jié)省、簡(jiǎn)化了電路設(shè)計(jì),應(yīng)用起來非常方便。.硬件方面,電路圖五,U9A 6N137, U10A 6N137 是光電隔離器件。
本車載儀表電子系統(tǒng)可作為一個(gè)CAN獨(dú)立節(jié)點(diǎn)用在CAN-BUS自動(dòng)化控制系統(tǒng)中,也可脫離CAN-BUS 獨(dú)立車載工作。PIC18F458 單片機(jī) 自帶CAN 收發(fā)接口,CAN模塊相對(duì)獨(dú)立。其主要特征如下:
通過 ISO CAN 標(biāo)準(zhǔn)測(cè)試,標(biāo)準(zhǔn)幀和擴(kuò)展數(shù)據(jù)幀二種模式,0-8位數(shù)據(jù)長(zhǎng)度,可編程速率高達(dá) 1M bps,2個(gè)數(shù)據(jù)接收緩沖器,6個(gè)完全接收濾波器,2個(gè)對(duì)應(yīng)高優(yōu)先權(quán)緩沖器,4個(gè)對(duì)應(yīng)的低優(yōu)先權(quán)緩沖器,2個(gè)完全接收掩碼器,3個(gè)具有優(yōu)先權(quán)的發(fā)送緩沖器。
CAN模塊可工作在六種模式下:配置模式、禁止模式、正常工作模式、監(jiān)聽模式、自循環(huán)模式、錯(cuò)誤識(shí)別模式。本系統(tǒng)涉及兩種模式: 配置模式和正常工作模式。
首先 在配置模式下將 CAN 控制 和 狀態(tài)寄存器,波特率控制寄存器,I/O控制寄存器,中斷標(biāo)志和中斷控制寄存器,接收掩碼器和接收濾波器按照系統(tǒng)的要求設(shè)定好,以保證 CAN 總線暢通。這些寄存器能在配置模式下進(jìn)行設(shè)定,設(shè)定完畢后系統(tǒng)進(jìn)入正常工作模式。本儀表系統(tǒng)可作為一個(gè) 下位機(jī)CAN 節(jié)點(diǎn) 用在車輛 CAN 控制系統(tǒng)中,等待CAN總線傳來的數(shù)據(jù)。
本儀表系統(tǒng)和車輛 CAN 控制系統(tǒng)中心的通訊涉及物理層、鏈路層及應(yīng)用層:
物理層要求: 通信協(xié)議符合 CAN2.0B。
鏈路層要求: 通信協(xié)議符合CAN2.0B,并部分參照 J1939/21。
應(yīng)用層: 在這僅給出 1.油壓信號(hào)、2.車速信號(hào)、二數(shù)據(jù)幀。
1)
|
2)車速信號(hào): 優(yōu)先級(jí): 6 偏置: 0 測(cè)量范圍:0----250.996KM/H 單位增益:1/256KM/H 傳送速率:100MS 數(shù)據(jù)長(zhǎng)度:8字節(jié) 數(shù)據(jù)頁(yè): 0 設(shè)備編號(hào):2 PF: 255 PS: 1 PGN: 65281(0XFF01) 1――2BYTE:車速 |
優(yōu)先級(jí): 6
偏置:0
測(cè)量范圍:0----500KPA
單位增益:2KPA
傳送速率:1S
數(shù)據(jù)長(zhǎng)度:8字節(jié)
數(shù)據(jù)頁(yè): 0
設(shè)備編號(hào):1
PF: 255
PS: 1
PGN: 65281(0XFF01)
1BYTE:油壓
2――8:保留(0XFF) 2――8:保留(0XFF)
圖五 CAN通信模塊工作接口圖:
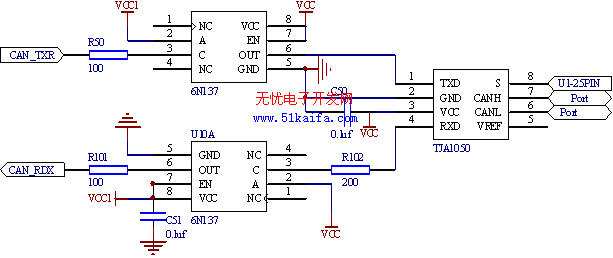
( 圖 五 )
車載儀表系統(tǒng)軟件工作原理及原理框圖
CPU PIC18F458雖然外圍接口是8位單片機(jī), 但內(nèi)核卻是16位的,可稱之為準(zhǔn)16位單片機(jī)。儀表系統(tǒng)復(fù)雜,程序量大。 考慮到編程人員的連續(xù)性,程序的可讀性, 程序的可移植性等, 軟件系統(tǒng)程序用C語(yǔ)言開發(fā)。 單片機(jī)PIC18F458 開發(fā) 仿真系統(tǒng)也支持 C語(yǔ)言環(huán)境。 編程.考慮到 該儀表系統(tǒng)的商用, 可持續(xù)性,為增加系統(tǒng)的穩(wěn)定性,后續(xù)擬引入實(shí)時(shí)性好工作可靠的商用嵌入式操作系統(tǒng),.軟件系統(tǒng)采用前后臺(tái)事件編程的方法。前 臺(tái)是主循環(huán)程序,后 臺(tái)是中斷處理程序。前 臺(tái)進(jìn)行數(shù)據(jù)處理,后 臺(tái)進(jìn)行數(shù)據(jù)采集。 采用事件編程方式,后臺(tái)改變系統(tǒng)的信息,前 臺(tái) 根據(jù) 后 臺(tái)改變的信息 來完成整套儀表系統(tǒng)的實(shí)時(shí)性處理。 軟件系統(tǒng)框圖因篇幅原因略去。
主要參考文獻(xiàn):
[1]《PIC18F458X 數(shù)據(jù)手冊(cè)——28/40腳16位 FLASH 單片機(jī)》。[美] Microchip Technology Inc 著,北京航空航天大學(xué)出版社。
[2] 王建國(guó).基于CAN的程序下載器與通訊調(diào)試器設(shè)計(jì)[J].微計(jì)算機(jī)信息,2007,6-2。
[3] 饒運(yùn)淘 等著。現(xiàn)場(chǎng)總線CAN原理與應(yīng)用技術(shù)[M]。北京航空航天大學(xué)出版社,2003,6。
相關(guān)閱讀:
- ...· “芯創(chuàng)杯”首屆高校未來汽車人機(jī)交互設(shè)計(jì)大賽報(bào)名正式啟動(dòng)
- ...· 探秘第二屆衛(wèi)藍(lán)山鷹“創(chuàng)新·共享”試驗(yàn)技術(shù)論壇!
- ...· “2018中國(guó)半導(dǎo)體生態(tài)鏈大會(huì)”在江蘇省盱眙舉行
- ...· 新主題新規(guī)劃,CITE 2019瞭望智慧未來
- ...· 從汽車到工廠,TI毫米波傳感器致力于創(chuàng)造更智能的世界
- ...· 意法半導(dǎo)體(ST)、Cinemo和Valens在CES 2018展上聯(lián)合演示汽車信息娛樂解決方案
- ...· 北京集成電路產(chǎn)業(yè)創(chuàng)新發(fā)展高峰論壇即將在京召開
- ...· 三菱電機(jī)強(qiáng)勢(shì)出擊PCIM亞洲2017展
- ...· GPGPU國(guó)產(chǎn)替代:中國(guó)芯片產(chǎn)業(yè)的空白地帶
- ...· 物聯(lián)網(wǎng)產(chǎn)品設(shè)計(jì)中Wi-Fi連接的四個(gè)關(guān)鍵因素
- ...· 第三屆中國(guó)MEMS智能傳感器產(chǎn)業(yè)發(fā)展大會(huì)即將于蚌埠拉開帷幕
- ...· IAIC專項(xiàng)賽演繹“中國(guó)芯“應(yīng)用創(chuàng)新,信息安全高峰論壇亮劍海寧
- ...· 智能控制有源鉗位反激
- ...· 解讀5G毫米波OTA 測(cè)試技術(shù)
- ...· 多個(gè)市場(chǎng)高速增長(zhǎng)推動(dòng)Molex加強(qiáng)汽車領(lǐng)域的發(fā)展
- ...· 中國(guó)綠色制造聯(lián)盟成立大會(huì)召開在即 政產(chǎn)學(xué)研用共探綠色發(fā)展新模式
- ...· Efinix® 全力驅(qū)動(dòng)AI邊緣計(jì)算,成功推出Trion™ T20 FPGA樣品, 同時(shí)將產(chǎn)品擴(kuò)展到二十萬邏輯單元的T200 FPGA
- ...· 英飛凌亮相進(jìn)博會(huì),引領(lǐng)智慧新生活
- ...· 三電產(chǎn)品開發(fā)及測(cè)試研討會(huì)北汽新能源專場(chǎng)成功舉行
- ...· Manz亞智科技跨入半導(dǎo)體領(lǐng)域 為面板級(jí)扇出型封裝提供化學(xué)濕制程、涂布及激光應(yīng)用等生產(chǎn)設(shè)備解決方案
- ...· 中電瑞華BITRODE動(dòng)力電池測(cè)試系統(tǒng)順利交付北汽新能源
- ...· 中電瑞華FTF系列電池測(cè)試系統(tǒng)中標(biāo)北京新能源汽車股份有限公司
- ...· 中電瑞華大功率高壓能源反饋式負(fù)載系統(tǒng)成功交付中電熊貓
- ...· 中電瑞華國(guó)際在電動(dòng)汽車及關(guān)鍵部件測(cè)評(píng)研討會(huì)上演繹先進(jìn)測(cè)評(píng)技術(shù)




- ...· 數(shù)據(jù)采集終端系統(tǒng)設(shè)備
- ...· 簡(jiǎn)儀科技踏上新征程
- ...· 易靈思® 宣布 AEC-Q100 資質(zhì)認(rèn)證和汽車系列產(chǎn)品計(jì)劃
- ...· 易靈思® 宣布擴(kuò)充高性能 鈦金系列™ FPGA 產(chǎn)品 鈦金系列產(chǎn)品擴(kuò)充至包含 1M 邏輯單元的 FPGA
- ...· 易靈思® 宣布Trion® Titanium 在臺(tái)積電 (TSMC) 16納米工藝節(jié)點(diǎn)流片
- ...· TI杯2019年全國(guó)大學(xué)生電子設(shè)計(jì)競(jìng)賽頒獎(jiǎng)典禮在京舉行
- ...· BlackBerry QNX虛擬機(jī)獲得全球首個(gè)汽車安全完整性等級(jí)(ASIL) ‘D’認(rèn)證
- ...· 威馬汽車選擇BlackBerry助力下一代汽車
- ...·圖文詳解汽車儀表板背后的車規(guī)級(jí)安全設(shè)計(jì)要求
- ...·使用有安全保障的閃存存儲(chǔ)構(gòu)建安全的汽車系統(tǒng)
- ...·反向偏置差分線性傳感器的較新進(jìn)展和應(yīng)用
- ...·艾德克斯測(cè)評(píng)某品牌智能插座——待機(jī)功耗篇
- ...·三線電阻式溫度檢測(cè)器測(cè)量系統(tǒng)中勵(lì)磁電流失配的影響(續(xù))
- ...·三線電阻式溫度檢測(cè)器測(cè)量系統(tǒng)中勵(lì)磁電流失配的影響
- ...·RTD測(cè)量系統(tǒng)中勵(lì)磁電流失配的影響
- ...·藍(lán)牙BR/EDR 和 Bluetooth Smart的十大重要區(qū)別
- ...·IoT網(wǎng)關(guān)平臺(tái)與應(yīng)用
- ...·增強(qiáng)版ARM DesignStart:通向定制化SoC的較快、較低風(fēng)險(xiǎn)之路
- ...·實(shí)體零售轉(zhuǎn)型O2O,倉(cāng)儲(chǔ)物流的智能化水平從何提升?
- ...·幾種車用LED驅(qū)動(dòng)方案的比較
- ...·藍(lán)牙配對(duì)第二篇:密鑰生成方法
- ...·中電瑞華推出領(lǐng)先的無線數(shù)據(jù)采集解決方案
- ...·安森美半導(dǎo)體配合市場(chǎng)趨勢(shì)的無線充電方案
- ...·安森美半導(dǎo)體配合汽車照明設(shè)計(jì)趨勢(shì)的解決方案


